La géométrie du
disque en rotation en Relativité :
Avertissement : Un disque matériel en rotation rigide est un objet
fictif. Nous nous intéressons ici aux effets
relativistes et non pas à la déformation
du disque matériel qui dépendrait de sa constitution (le matériau dont il est
fait) et qui devrait faire intervenir la résistance des matériaux. Le disque
sera supposé infiniment mince (sans masse) , en fait
le problème formel est celui d’un référentiel en rotation uniforme. Mais comme
c’est un peu abstrait, on parle de disque en rotation pour mieux illustrer le
problème traité.
Résumé : L’étude du cas d’un disque rigide en rotation à des
vitesses relativistes, traitée dans le cadre de cette théorie, soulève
d’intéressants paradoxes, et fait l’objet de nombreux contresens
d’interprétation, y compris par Einstein, Ehrenfest
et quelques autres grands esprits du même acabit.
Qu’est ce qui a pu égarer
des esprits aussi avisés, et en quoi sommes nous en mesure de donner aujourd’hui
une démonstration et une interprétation que nous considérons comme définitive (
dans le cadre de cette théorie), là, où les concepteurs ont échoué?
Rappelons, qu’Einstein à
cette époque, se concentrait sur l’élaboration de la théorie de la Relativité
générale, qui lui donnait bien du fil à retordre. Un sujet comme le disque en
rotation relativiste, qui faisait figure d’aimable casse tête intellectuel,
physiquement irréaliste, n’a pas du le distraire beaucoup de ses préoccupations
du moment. Les solutions classiques décrivent correctement les solutions
réalisables (effet Sagnac ), ceci explique qu’il ait retenu de ce cas, que ce qui
l’intéressait pour sa nouvelle théorie, sans aller au delà de sa vision
intuitive du problème .
Revenons au points essentiels :
L’application de la Relativité Restreinte dans le cas d’un disque, ne peut
se faire qu’au niveau local, car la Relativité Restreinte s’appliquant à
des référentiels inertiels, ils ne peuvent être que locaux, puisque, où que
l’on soit sur le disque, il n’existe pas de référentiel global inertiel.
Pire tous les référentiels locaux inertiels, définis en des points différents
du disque inertiels sont différents, (une double infinité de référentiels).
On voit que l’on va jongler
sans cesse entre les différents référentiels inertiels, gymnastique périlleuse,
entre lesquels la simultanéité des évènements n’est pas assurée. (Comme le
paradoxe de Langevin, qui est de même nature, nous l’a appris, en Relativité,
la simultanéité n’a pas de caractère absolu).
Comme dans le paradoxe de
Langevin, nous allons avoir des boucles spatio-temporelles, qui vont mettre en
évidence des « désynchronisations spatio-temporelles » (holonomies).
Deux observateurs ensembles,
au départ, puis se séparant et suivant chacun des lignes d’univers dans des
référentiels différents dont un au moins n’est pas inertiel (pour que la boucle
puisse de fermer), vont se réunir à nouveau,
plus tard, et vont constater des désynchronisations temporelles (l’un a
plus vieilli que l’autre).
Appréhender la géométrie
du disque en rotation telle que vue par les différents observateurs, est un
vrai cauchemar, cette géométrie n’est pas définie, elle dépend de
l’observateur !
Notre esprit est implicitement égaré, par le sujet traité. Le
concept même de disque, implique, que dans notre esprit, la géométrie globale
de l’objet est omniprésente ( c’est elle qui définit l’objet dont on parle),
alors qu’on va voir que la perception de la géométrie qu’en ont les différents
observateurs peut être très différente de celle d’un disque et qu’en
particulier la périphérie mobile du disque et son environnement immédiatement
externe ( fixe) ont des géométries différentes et ne coïncident pas
géométriquement parlant, comme notre intuition, nous le laisserait supposer,
mais que d’autres paradoxes de la relativité illustrent bien (rappelons nous
comment un train en mouvement relativiste plus long qu’un tunnel, peut sembler
y être contenu). Ici c’est poussé au paroxysme, car même sur le disque, un
observateur va en avoir une vision déformée, du fait qu’en aucun point le
référentiel inertiel local est identique à celui défini en un autre
point . De nouveaux paradoxes apparaissent car alors que la géométrie
spatiale du disque évaluée dans le référentiel
en rotation attaché au centre du disque présente une courbure «
négative » c’est à dire que la circonférence est supérieure au rayon
multiplié par 2pi, pour un observateur sur le disque, mais à la périphérie,
s’il calcule le périmètre (vu par lui
comme un cercle déformé) comme la Relativité le prescrit c’est l’inverse !
Pour bien comprendre ce
qui suit, il faut donc oublier la géométrie globale, en jeu, traiter le
problème localement dans les référentiels inertiels locaux et ne se ressouvenir
de la géométrie globale qu’en tant que domaine d’intégration des équations
locales.
Pour ceux qui veulent en
savoir plus, suivez ces conseils et armez vous de courage et d’abnégation.
1-Présentation générale
1-1 Introduction
Je me suis pas mal inspiré
du document « The curvature
of the Relativistic Rotating Disk » de Brian
Keating ( sous la supervision du Dr Teymour Darkhosh.
référence :
http://www.smcm.edu/nsm/physics/SMP03S/KeatingB.doc.pdf,
dont j’ai fait une traduction, commentée disponible en :
http://www-cosmosaf.iap.fr/Disque%20en%20rotation.htm
Comme, j’ai relevé pas mal
d’erreurs, de calculs et aussi parfois d’interprétation, sans que cela remette
en cause l’approche épistémologique globale, ce document est difficilement
lisible. La version qui suit est « la mise au propre » du document
commenté. Les quelques erreurs que je n’ai pas pu corriger pour des raisons pratiques
étant mentionnées.
1-2 Simultanéité en Relativité ( Illustration et rappel)
Pour mettre en évidence ce
point simplement, considérons seulement 4 référentiels inertiels (instantanés),
K1, K2,K3 et K4, parmi l’infinité de référentiels
différents possibles.
Voir figure 1
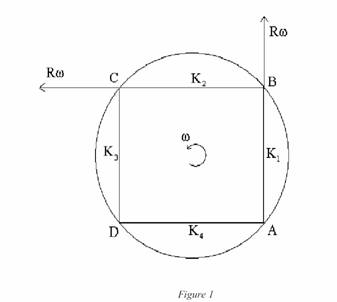
Les lettres A, B, C, D
représentent des évènements (disons l’émission d’un éclair) qui se produisent à
la périphérie du disque.
Je peux contraindre les
évènements, A et B pour qu’ils soient simultanés dans K1, B et C simultanés dans K2, C et D simultanés
dans K3, je dispose des degrés de liberté pour cela. Par contre, ayant utilisé tous mes degrés de
liberté, je ne sais rien, et ne peux pas
contraindre, la chronologie de D et A
dans K4.
Si A et B sont simultanés
dans K1, alors dans K2, lorsqu’on fait la transformation de
référentiel K2/K1 on s’aperçoit que A est
antérieur à B du fait du mouvement relatif de K1 par rapport à
K2 de A vers B
{Quelques
mots pour illustrer sans calcul, l’affirmation : La simultanéité s’apprécie dans K1 par le fait qu’un observateur O
situé au milieu de AB, va voir les deux éclairs en même temps.
La
lumière émise de A, va dans le même sens
que le mouvement relatif de K1 par rapport à K2 dans cette direction, cette lumière
émise de A, va donc à la rencontre des observateurs de K2, c’est pour cela que A va être vu
avant B par les observateurs de K2.Les sceptiques pourront faire le calcul par les formules de Lorentz qui
confirment ce point}
De même dans K3, B va être antérieur à C et dans K4, C va être
antérieur à D.
Le problème présentant un
caractère cyclique, en fermant le cycle, on est tenté de se demander si sur le
dernier tronçon, K4, on a la même
propriété : D
et A sont simultanés dans K4,
Si je suppose que c’est le
cas, on voit que D est antérieur à A dans K1. Si on suppose que
ces relations d’ordre temporel sont « transitives », on déduit par récurrence, que A est antérieur à B, qui
est antérieur à C, qui est antérieur à D qui est antérieur à A ! . On arrive à une « contradiction », A est antérieur
à A dans le référentiel K1. Hors du cas trivial, ou le disque est au repos, on
voit que c’est absurde. Le fait simple de fermer la boucle nous suggère qu’une
« discontinuité » doit se manifester à cette occasion.
On voit sur ce exemple, qu’en
relativité la notion de simultanéité, définissant « l’avant » et
« l’après », est relative,
dépend des référentiels considérés, et que la transitivité des relations n’est
évidemment pas respectée dans le cas général.
1-3 Géométrie du disque
en rotation
Un paradoxe plus fondamental
et plus troublant a été proposé par Selleri dans
l’article cité en référence [4].
Par un raisonnement
élémentaire, on peut montrer, en supposant seulement que la circonférence du disque a une
géométrie bien définie, que le rapport de la vitesse apparente de lumière
en contre- rotation et co-rotation est donné par

où ![]() est la vitesse angulaire supposée constante,
et R le rayon du disque, avec
est la vitesse angulaire supposée constante,
et R le rayon du disque, avec
![]() ,
,
et c+ et c- sont
les vitesses de la lumière en co-rotation et contre rotation respectivement.
Le paradoxe se produit
quand : ![]() et
et ![]() dans
l’équation, (1.1), en gardant la vitesse tangentielle constante, soit :
dans
l’équation, (1.1), en gardant la vitesse tangentielle constante, soit : ![]()
Remarquons que
l’accélération centrifuge :![]() ,.
,.
Le référentiel associé
au bord du disque tend donc vers un référentiel
inertiel, se déplaçant à la vitesse : ![]() ,
par rapport à un observateur au centre, attaché au référentiel fixe.
,
par rapport à un observateur au centre, attaché au référentiel fixe.
Ceci crée une discontinuité,
car on sait que dans un référentiel inertiel la vitesse de la lumière est la
même dans les deux sens, soit :![]() ,
résultat qu’on devrait trouver logiquement au passage à la limite dans ce cas.
,
résultat qu’on devrait trouver logiquement au passage à la limite dans ce cas.
Il n’en n’est rien, la
formule (1.1), au passage à la limite indiquée,
reste invariante, du fait de l’invariance de
« v », et donne une valeur très différente.
On voit bien, que
manifestement, une des hypothèses faites ne doit pas être valide.
1-4 L’Effet
Sagnac
Il y a des confirmations de
l’apparente « anisotropie » de la vitesse de la lumière sur un disque
en rotation. Si un faisceau laser (cohérent) est fractionné en deux faisceaux
(cohérents) se déplaçant en sens contraire sur le disque sur la périphérie d’un
disque en rotation rapide (au moyen de miroirs semi transparents par exemple)
et recombiné de façon à faire interférer les deux faisceaux près du miroir séparateur, un déplacement de
franges d’interférences est observé lorsqu’on modifie la vitesse de rotation.
Pour les détails sur l’effet
Sagnac voir :
http://www.mathpages.com/rr/s2-07/2-07.htm
Cet effet fut remarqué par Sagnac en 1913, et est appelé effet Sagnac.
A ceux qui pourraient
penser, que du fait des « accélérations » rencontrées dans ce
problème la Relativité Générale s’impose,
rappelons que la Relativité Générale est une théorie de la gravitation,
qui n’a pas lieu d’être ici.
La Relativité Restreinte est
parfaitement adaptée au traitement des effets cinématiques et des accélérations
liées à l’utilisation de référentiels en rotation, par exemple, et l’usage du
calcul tensoriel n’est pas réservé à la Relativité Générale. Simplement dans ce
cas, comme on va traiter de référentiels qui ne sont pas tous inertiels, l’espace « global » n’est pas
Minkowskien, il ne l’est qu’au niveau infinitésimal, ce qui permet d’établir
des équations différentielles locales, qui par intégration nous donnera la
solution globale.
2. Premières considérations
L’effet Sagnac,
qui a été largement vérifié en Laboratoire, une expérience ayant même utilisé la
Terre, elle même, comme corps en rotation, paraît être le point le plus délicat
soulevé dans l’introduction.
Ce point a fait couler
beaucoup d’encre. Malykin [6] a passé en revue les
communications sur le sujet et on peut considérer que le point est résolu.
Mon intention dans ce
document n’est pas d’expliquer l’effet Sagnac (cela a
été fait), mais plutôt de clarifier ou d’expliquer les paradoxes concernant ce
sujet.
Le premier contre argument,
est que la RR ne s’applique pas à un disque en rotation, la célérité de la
lumière étant localement anisotropique sur le disque
et que l’addition galiléenne des vitesses est valide dans ce cas.
Au moins un auteur [7] a été
jusqu’à reconstruire une cinématique du disque en rotation à partir du postulat
d’addition des vitesses galiléen en suivant la méthode qu’avait utilisé
Einstein pour établir la RR. Il peut paraître surprenant de trouver cela dans
la littérature, mais en fait ce point de vue est encore enraciné dans certains
esprits.
Nous ne partageons pas cette
approche qui nous paraît physiquement inconsistante. Notre objectif est
d’utiliser un ensemble d’axiomes valables dans tous les référentiels.
Avoir des théories
différentes pour décrire les mouvements rectilignes et en rotation, nous paraît
épistémologiquement pas souhaitable.
Les confirmations
expérimentales de RR nous incitent par ailleurs à bien réfléchir avant
d’abandonner cette théorie à la première difficulté rencontrée, au profit d’une
autre théorie ad hoc.
Comme indiqué avant, Einstein considéra le problème. Avec d’autres
physiciens éminents, déclara que la circonférence C était telle que :![]()
Il considéra que la
circonférence dans le référentiel, fixe C0, et la
circonférence du disque en rotation C étaient géométriquement équivalentes.
Comme les règles étalon, à la périphérie du disque subissaient une contraction
de Lorentz, selon la formule habituelle, alors la mesure de la circonférence
vaut :
Ceci ne l’a pas inquiété
outre mesure. Il fit l’hypothèse que le disque devait se plier et se courber de
sorte à satisfaire la contraction de Lorentz.
Nous reviendrons sur ce
point plus loin.
3. Circonférence mesurée par
différents observateurs
Demandons nous ce qu’un
observateur solidaire du disque, situé à sa périphérie, mesure comme
circonférence. Supposons qu’on a disposé sur le disque, des règles et des horloges, en chaque
point, synchronisées comme on sait le
faire en RR. Du point de vue de l’observateur immobile au centre O, un point A
à la périphérie se déplace à une vitesse ![]() , il va donc mesurer que la longueur
infinitésimale d’une portion de la périphérie vaut :
, il va donc mesurer que la longueur
infinitésimale d’une portion de la périphérie vaut :
Cette contraction n’est pas
physique, cependant car elle dépend de
l’observateur. L’observateur sur le disque, à la périphérie, ne va pas observer
de contraction localement (dans son voisinage immédiat).
Il va constater que son
référentiel « instantané » se déplace à la vitesse ![]() par rapport à O immobile, mais va mesurer que
la même petite portion de périphérie vaut
par rapport à O immobile, mais va mesurer que
la même petite portion de périphérie vaut ![]()
Supposons que l’observateur
regarde un autre point B de la circonférence tel que l’angle AÔB = ![]() . Pour un observateur en O, le point A, a une vitesse de :
. Pour un observateur en O, le point A, a une vitesse de : ![]() et le point B a une vitesse de
et le point B a une vitesse de ![]()
{ i et j sont des vecteurs de base orthogonaux attachés
au référentiel fixe en O, la situation est représentée sur la figure 1A}
Figure 1A
Diagramme du point de vue de
l’observateur en O fixe, les différents référentiels locaux inertiels impliqués
sont :
-
R_0, celui attaché à O fixe
-
R_A,
Celui attaché à A, animé d’une vitesse V
par rapport à R_O
-
R_B,
Celui attaché à B animé d’une vitesse par rapport à R_O, et à R_A
-
R_A’,
Celui attaché à A’, le vis à vis de A, mais à
l’extérieur du disque, fixe par rapport à R_O.
Il y a des référentiels
partout. Le risque de se tromper est maximum. Sans compter qu’on va devoir
intégrer pour trouver la solution globale. Pour faire un calcul béton, il est
naturel de raisonner en prenant comme point de départ la description depuis le
référentiel fixe situé en O, au moins là les choses sont claires, puisque c’est
à partir de là qu’on a défini le problème, et si on garde R et théta comme
variables, on sait que le domaine d’intégration est pour théta
de 0 à 2pi. Ensuite, on calculera à partir des formules de Lorentz, dont on
établira de façon indiscutable le paramètre « v », en bétonnant comme
précédemment, les longueurs et temps
dans les autres référentiels, à partir de ces variables initiales. Les
mathématiques nous garantissant que l’intégrité de notre approche est
conservée.
C’est lourd, mais c’est à ce
prix qu’on pourra se fier au résultat obtenu ; m^me s’il nous
surprend !
La méthode va consister à
évaluer la vitesse de R_B par rapport à R_O,.
Puis par changement de
référentiel,R_O vers R_A ( on connaît les vitesses
relatives), calculer la vitesse de R_B par rapport à R_A.
Cette vitesse va permettre
de déterminer le facteur de contraction de Lorentz à appliquer entre les
référentiels R_B, et R_A.
On en connaît la valeur
mesurée de l’élément différentiel, par
l’observateur dans son référentiel, c’est R.d(théta).
En intégrant sur théta de 0 à 2pi, on va trouver le calcul de la longueur de
la « circonférence » (périmètre serait plus correct, car la géométrie
est déformée pour cet observateur) de la
périphérie du disque vue par cet observateur A,
depuis le bord du disque en rotation (on conçoit que la géométrie du
cercle est déformée).
On peut alors aussi calculer
cette longueur telle que mesurée par l’observateur A’ (référentiel A’),ce
qui est fait dans la formule (2.6) puisqu’on connaît la vitesse relative de A
et A’, c’est , V, donc le facteur de contraction associé : racine ( 1-v²/c²) .
Arrivé à ce stade, de la
démonstration, il est recommandé de prendre une aspirine !
Figure 1B
Le point de vue depuis le
référentiel inertiel local attaché à A, considéré comme fixe, montre la
transformation à effectuer,( la composition des vitesses vue de R_A), pour
obtenir la vitesse de R_B dans R_A, ici R_A’ n’a pas été représenté
Si je transpose cela dans le
référentiel de A (que je distingue en le notant avec des « ‘ » ), nous trouvons que l’observateur en A mesure les
composantes suivantes pour la vitesse.
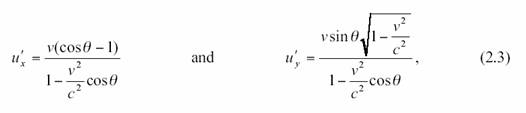
où nous avons posé ![]() Alors :
Alors :
{ En fait on peut directement appliquer la formule de
composition des vitesses établie par Einstein en 1905 qui est relatée ci
dessous en 2.4, en notant qu’on se place dans le référentiel R_A et que la
composition des vitesses est celle de l’observateur fixe attaché à O qui a une
vitesse – V par rapport à R_A et celle de l’observateur en B qui va faire un
angle pi – théta
avec la vitesse de O }
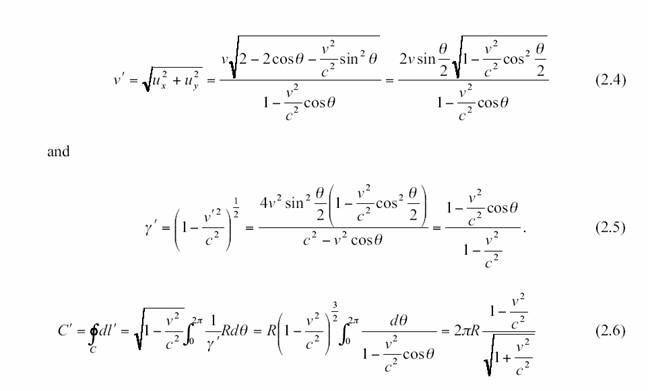
{Errata : Dans la formule
(2.5), premier terme qui suit le premier signe = , lire (1-v’²/c²)- ½ , au lieu de
(1-v’²/c²) ½. }
La formule (2.6) est établie dans le référentiel R_A’, (au
repos par rapport à l’observateur O ), attaché à l’observateur A’ qui mesure la « circonférence » du
disque en rotation, puisqu’il tient compte de la contraction de longueur liée à
son mouvement par rapport à l’observateur A.
Dans le référentiel R_A attaché à
l’observateur A sur le disque, on trouve le calcul à la fin du chapitre
6,( il faut diviser par le facteur de contraction de
Lorentz associé à V
Comparons cette
circonférence à celle mesuré par l’observateur fixe, en O

Nous voyons que ![]() Ce que vont mesurer les observateurs va
dépendre de leur position sur le disque, et ils ne seront pas d’accord sur la
valeur de la circonférence.
Ce que vont mesurer les observateurs va
dépendre de leur position sur le disque, et ils ne seront pas d’accord sur la
valeur de la circonférence.
Manifestement, leur
perception variée de ce qu’est la circonférence montre qu’elles ne sont pas
géométriquement équivalentes contrairement à ce que Lorentz, Ehrenfest et quelques autres {dont Einstein} prétendaient.
Là, vous pouvez reprendre
une aspirine, si nécessaire.
4. Courbure sur le disque
Demandons nous s’il possède
une courbure gaussienne ( intrinsèque). Compte tenu de
la symétrie du problème, on est incité à travailler en coordonnées
cylindriques.
Partons d’un espace temps
plat.
Où, ![]() et
et
![]()
Pour un observateur situé à l’origine
( en O), la transformation de coordonnées entre le référentiel inertiel de
départ et un référentiel attaché au disque tournant à vitesse angulaire
constante oméga est ( immédiatement) donné par
En utilisant l’invariance de
l’intervalle d’espace temps
![]()
où ![]() est
le temps propre d’une particule au repos dans le référentiel, et
est
le temps propre d’une particule au repos dans le référentiel, et
![]()
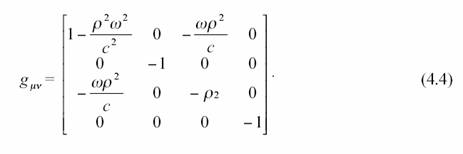
nous trouvons que
![]()
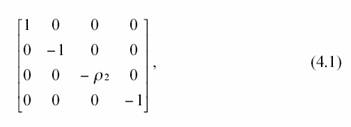
on peut en synthétiser la métrique des coordonnées
« ‘ » dans le tableau suivant
Supposons que :
![]()
comme c’est le cas pour un point au repos, en particulier
sur la circonférence du disque, nous trouvons :

Ceci est la dilatation
temporelle de Lorentz classique.
Calculons le tenseur métrique inverse
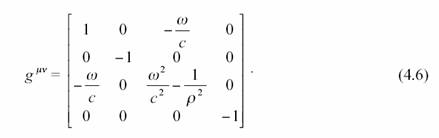
Avec tout cela, on peut
calculer les symboles de Christoffel par la formule :

où ![]() est
l’abréviation de
est
l’abréviation de ![]() ,
Ils valent :
,
Ils valent :
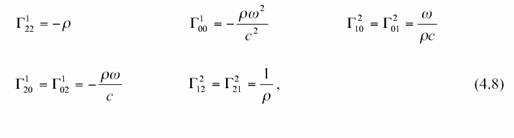
Tous les autres symboles
sont nuls.
En utilisant (4.7) ou (4.8) on peut calculer et vérifier
que le tenseur de Riemann ![]() 0, ce qui montre que l’espace est plat, ce qui
n’est pas surprenant , puisqu’on l’a choisi plat au départ et qu’on n’a fait
que le décrire dans un autre système de coordonnées. Les équations du champ en
Relativité générale stipulent que seule la présence de matière- énergie ( un
champ électromagnétique fait l’affaire) est capable de déformer l’espace temps
en un système fermé, et dans l’analyse , le disque a été supposé
implicitement , sans masse infiniment
fin et tournant à vitesse constante.
0, ce qui montre que l’espace est plat, ce qui
n’est pas surprenant , puisqu’on l’a choisi plat au départ et qu’on n’a fait
que le décrire dans un autre système de coordonnées. Les équations du champ en
Relativité générale stipulent que seule la présence de matière- énergie ( un
champ électromagnétique fait l’affaire) est capable de déformer l’espace temps
en un système fermé, et dans l’analyse , le disque a été supposé
implicitement , sans masse infiniment
fin et tournant à vitesse constante.
Cependant on peut séparer
l’espace temps en espace et en temps.
Considérons deux points sur le disque A et B séparés par une faible
distance dxi ( i = 1,2,3) .
Une règle attachée à A, à la limite de la séparation tendant vers zéro,
va pratiquement être au repos par rapport à B.
On peut séparer les parties
spatiales et temporelles ( Landau – Lifchitz théorie des champs [10])
Bien entendu cette
séparation n’est valable que localement. Le Landau Lifchitz
donne la partie spatiale de ![]() comme
suit :
comme
suit :

En reportant la métrique
précédente dans cette formule on obtient pour la métrique spatiale :
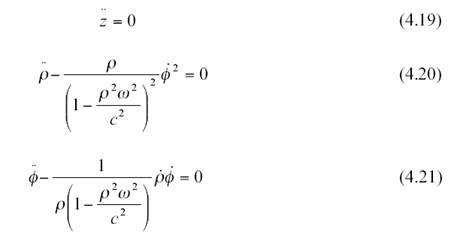
et pour les symboles de Christoffel

Tous les autres symboles
sont nuls. Alors l’équation géodésique devient
A partir du tenseur métrique
de la partie spatiale ( 3D), permettant de calculer le
dl², le Landau Lifchitz
fait observer que si on fait dz = dr
= 0,) et qu’on intègre de 0 à 2pi, on trouve que la longueur de la
« circonférence » ainsi calculée est supérieure à 2 pi.R, ( c’est
très simple à vérifier) ce qui caractérise une courbure négative. Calculons la
courbure directement. Rappelons que le scalaire de courbure (
scalaire de Ricci) est défini par :

et le tenseur de Ricci par

L’opposé du scalaire de
courbure vaut :

L’opposé de ce scalaire est
toujours positif, ce qui fait que le scalaire de courbure est toujours
négatif, comme la remarque du Landau Lifchitz le
laissait entendre. Ceci paraît en contradiction avec les résultats que nous
avons trouvés à la fin du chapitre 2. Alors quoi ! La Relativité
Restreinte nous t’elle raconte n’importe quoi ?
Que nenni !
D’abord, il s’agit d’une
courbure spatiale intrinsèque 3D et non pas une courbure extrinsèque 2D, comme
on est tenté de se la représenter.
En fait le résultat trouvé
ici n’est pas en contradiction avec les formules (2.4)-(2.6), s’agissant de
choses différentes, car évaluées dans des référentiels différents.
Le scalaire de Ricci 4D
est lui invariant par toutes les
transformations de coordonnées puisque c’est un scalaire,(
d’ailleurs dans notre cas , il est nul),
mais pas le scalaire de Ricci
de la partie spatiale seulement qui dépend du référentiel
choisi..Pour s’en persuader, il suffit de le calculer dans le système de
référence, représentant le même espace temps, dont on est parti, il est nul dans ce cas (
tous les symboles de Christoffel sont nuls).
Ce point est important si on
veut y comprendre quelque chose. (Une troisième aspirine ?)
5. Synchronisme sur la circonférence
du disque.
L’effet Sagnac,
et en fait toutes les menues contrariétés que nous avons endurées tout au long de
ce document, ont leur source dans l’impossibilité de synchroniser les horloges
sur le disque en utilisant la seule méthode possible, permettant aux
observateurs de s’accorder, celle définie en Relativité Restreinte. Dans
l’introduction nous vous avions déjà signalé la non transitivité de la
procédure de synchronisation à la périphérie du disque. Evaluons ce défaut de
synchronisation.
Imaginons deux évènements A
et B, simultanés dans un référentiel K, attaché à la périphérie du disque en
rotation, séparé par une distance dx. Regardons ce
qui se passe du point de vue d’un référentiel adjacent K’ (fixe) :
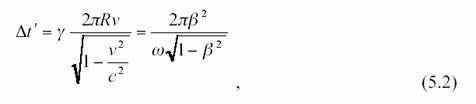
On peut évaluer le temps
séparant A et B dans le référentiel K’ par les transformations de Lorentz.

{
Attention ! « dt ’ », est le temps
« dt » qui s’écoule sur le
référentiel en rotation ( le disque) mais évalué par un observateur
« fixe » attaché au référentiel K’. Si le disque a une
vitesse « v » par rapport au référentiel « fixe », la
vitesse relative de K’ par rapport à K est alors de – v, d’ou la forme de la
formule avec le signe + ( c’est la formule réciproque de la formule de base).
Dans ce cas, gamma = racine de ( 1-v²/c²) grandeur constante , l’intégration sur 2pi est
immédiate et donne (5.2)}
Considérons maintenant la
différence de temps entre B et C, dans un troisième référentiel infinitésimal
et procédons ainsi de proche en proche tout le long de la circonférence du
disque. En intégrant la vitesse de 0 à ![]() on
voit qu’il existe une différence de temps lorsqu’on fait le tour du disque.
on
voit qu’il existe une différence de temps lorsqu’on fait le tour du disque.
qui est précisément ce qui est mesuré par l’effet Sagnac sous forme de différence de phase entre les
faisceaux co et contra rotationnels.
[4][5][6]
Nous voyons que la
désynchronisation, est fondamentalement une
manifestation différente du paradoxe des jumeaux. Comme dans le paradoxe des
jumeaux c’est le changement de référentiel qui est à la source de la
discordance, bien qu’ici, par rapport, à la version de base ou le demi tour est
instantané (mais le demi tour, comme l’accélération de départ et d’arrivée peuvent
être également continus, sans que cela ne change le principe dans le paradoxe
de Langevin), le changement de référentiel est infinitésimal et continu.
Signalons également que la différence de
temps entre celui marqué par une horloge qui a voyagé autour du disque et une
qui est restée au repos par rapport au
disque est un effet objectif (puisqu’on se retrouve au même point, comme dans
le cas du paradoxe des jumeaux au retour ).
Malgré les désaccords sur la notion de simultanéité des différents observateurs,
ceux ci s’accorderont par contre sur la désynchronisation objective qui se
produit après un tour.
6.1 De l’objectivité de la courbure
spatiale
En l’absence de matière et autres sources
gravitationnelles, à ce point on peut se demander après le calcul de la
courbure spatiale ( 4.22), d’où elle vient. Est elle
«objective» ?.
Dans l’espace à 3+1
dimensions où nous avons nos habitudes de pensée, ce n’est pas très clair, mais
dans l’espace temps de la RR à quatre dimensions ce n’est pas ambigu. On peut
éclairer le débat en traçant un simple diagramme d’espace temps. Comme le
disque est supposé infiniment fin, et que rien ne se produit dans la direction
« z » nous pouvons supprimer le troisième dimension et traiter le
problème en deux dimensions (spatiales), ce qui permet d’utiliser la dimension
libérée pour représenter l’évolution temporelle.
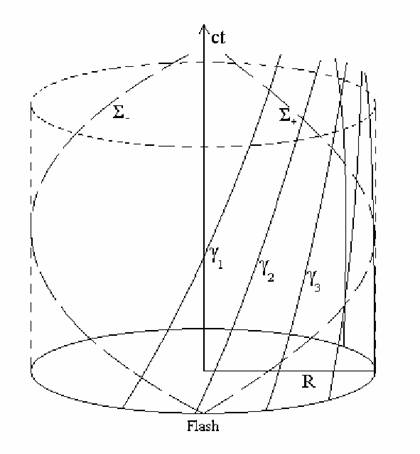
Figure 2
Comme montré sur la figure 2
ci dessus, (empruntée à [5]), les lignes d’univers les points de la périphérie
du disque, dénotées ![]() ,
etc.. sont des hélices de type temps, comme de bien
entendu, car des particules massives ne peuvent pas aller plus vite que la
lumière. Les chemins
,
etc.. sont des hélices de type temps, comme de bien
entendu, car des particules massives ne peuvent pas aller plus vite que la
lumière. Les chemins ![]() et
et ![]() associés
aux rayons lumineux issus d’un éclair
lumineux et se propageant en sens contraire sont aussi des hélices, mais de
type lumière comme il se doit, s’enroulant en sens contraire autour tu tube
d’univers tracé par le disque. Ceci est en général admis et pas controversé
dans la littérature.
associés
aux rayons lumineux issus d’un éclair
lumineux et se propageant en sens contraire sont aussi des hélices, mais de
type lumière comme il se doit, s’enroulant en sens contraire autour tu tube
d’univers tracé par le disque. Ceci est en général admis et pas controversé
dans la littérature.
Le problème se corse quand
on essaie de définir le lieu des « simultanéités » correspondant à
la périphérie du disque. En utilisant la définition de la RR de la
simultanéité, les évènements simultanés à un éclair vont être orthogonaux aux
lignes d’univers de l’observateur en question (dans ce cas, un observateur
chevauchant l’onde électromagnétique produite par l’éclair). L’intégration que
nous avons faite au chapitre 5, est vue
comme mesurant une courbe ouverte de type espace dans l’espace temps.
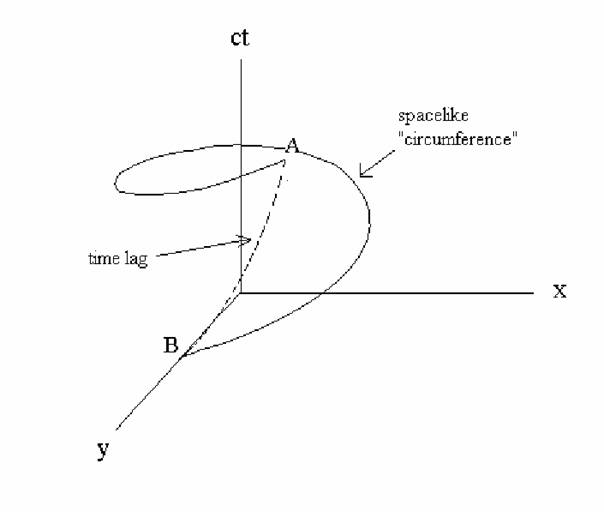
Figure 3
De la figure 3, il ressort que
l’extrémité d’un ruban, appliqué sur la périphérie du disque ne va pas
rejoindre l’autre extrémité au même point temporel. Les deux extrémités vont
être séparées par une ligne d’univers de type temps dont la longueur est donnée
par l’équation (5.2). Quand ![]() ,
les lignes d’univers des points à la périphérie du disque, sont des droites et
le lieu des évènements simultané à l’éclair
est une courbe fermée de type espace.
,
les lignes d’univers des points à la périphérie du disque, sont des droites et
le lieu des évènements simultané à l’éclair
est une courbe fermée de type espace.
Mais dès que le disque est
mis en rotation, et devient une courbe ouverte, de sorte que la notion de
simultanéité devient conventionnelle, dépendant du point de départ de
l’intégration effectuée au chapitre 5. Remarquons aussi, qu’en combinant les
figures 2 et 3, l’angle que les faisceaux lumineux ![]() et
et
![]() font avec les
font avec les ![]() de type temps (dans la figure 2) est égal à
l’angle entre les rayons et la «circonférence»
(dans la figure 3) : Ceci est évidemment dû au fait que la
vitesse de la lumière mesurée dans les référentiels tangents inertiels est la
même et égale à « c ».
de type temps (dans la figure 2) est égal à
l’angle entre les rayons et la «circonférence»
(dans la figure 3) : Ceci est évidemment dû au fait que la
vitesse de la lumière mesurée dans les référentiels tangents inertiels est la
même et égale à « c ».
Alors que ceci est plutôt
clair dans l’espace temps 4D, il est moins évident de dire ce que ceci
signifie pour un observateur sur le
disque.
Considérons un observateur
muni, comme d’habitude, d’un nombre
infini de minuscules petites règles et de deux horloges identiques synchronisées.
Quand il voyage le long du bord du disque, à vitesse non relativiste (par
rapport au bord du disque), il dépose ses règles étalons et transporte une
horloge avec lui. Lorsqu’il atteint de nouveau
son point de départ, il va
conclure que la circonférence correspond au nombre de règles étalons qu’il a
déposé, soit :
 .
.
Ceci est compatible avec la
valeur donnée au (2.6), pour ce que mesure un observateur fixe, juste à la
périphérie du disque, qui observe une contraction complémentaire par un facteur
de Lorentz lié sa vitesse V relative.
Cependant, il va constater que son horloge
retarde par rapport à celle qu’il a laissé sur place d’une valeur donnée par
(5.2).
Nous voyons donc, que la
courbure obtenue par la méthode suggérée par Moller
est résulte du fait qu’on force artificiellement les points A et B dans la
figure 4 à être réunis.
On procède à une
identification des points représentant les extrémités, comme cela se fait dans
les espaces-temps « compacts ». Le disque en rotation est un espace
temps compact. Il faut donc prendre en compte ce qu’on appelle
« l’holonomie » de la boucle pour que cette indentification liée à la
compacité de l’espace se fasse correctement.
Cette remarque s’applique
évidemment à toute la classe de problèmes qui mettent en jeu des boucles dans
l’espace-temps. Le paradoxe de Langevin par exemple, dans sa version classique
possède cette caractéristique. L’holonomie est alors constaté par la différence
de temps propre entre les jumeaux.
Formellement ceci peut être
vu comme une conséquence du théorème de Stockes :dans une variété
Riemannienne la circulation, d’une (n-1)_ forme linéaire M le long d’un contour fermé, délimitant une
surface est égal à l’intégrale de surface
« flux » de la n_ forme dérivée dM . Cette intégrale est
nulle seulement si la n-1 forme est exacte ou fermée.
7. Conclusion
Comme beaucoup de paradoxes,
le paradoxe d’Ehrenfest naît de l’absence de notion
de simultanéité absolue en Relativité. Il est clair que la plupart des
physiciens qui ont étudié le disque en rotation, ont implicitement supposé que
la circonférence du disque en rotation avait une géométrie bien définie. Cependant en s’appuyant sur des diagrammes de
Minkowski, plutôt simples, on voit qu’une définition naturelle et cohérente de
la simultanéité pour l’ensemble de la périphérie du disque n’est pas possible,
ceci étant très caractérisé pour des rotations rapides. Si on décompose
l’espace temps en temps et espace, les résultats de calculs ne vont pas
permettre une vérification expérimentale (en fait c’est ainsi que la courbure
calculée au chapitre 4 apparaît)
Le plus simple est encore de
voir les paradoxes du disque en rotation comme une déclinaison du paradoxe des
jumeaux. C’est dans le changement
incessant de référentiel de référence que le temps se « perd » (et
aussi le peu de raison qui reste au courageux qui est arrivé jusque là !) .
Citons Rizzi
et Tartaglia [5]
« Un disque en
rotation n’admet pas de « référentiel (global) propre » bien défini.
Il faut plutôt regarder cela comme une classe
de référentiel constitué d’un nombre infini de référentiels locaux propres
considérés aux différents points à différents instants et assemblés selon
certaines règles »
[9] http://www.mathpages.com/rr/s2-07/2-07.htm
[10] Landau Lifchitz, : théorie des champs.