La géométrie du
disque en rotation, d’après :
http://www.smcm.edu/nsm/physics/SMP03S/KeatingB.doc.pdf
Traduction libre J. Fric, qui
endosse toute responsabilité pour toutes les erreurs que sa traduction aurait
pu introduire. Commentaires personnels en petits caractères italiques rouges entre { ..}.
Ces commentaires n’engagent évidemment que moi…
Date de création du
document : le 8 Mars 2004
1-Introduction
L’étude du cas d’un disque rigide en rotation
à des vitesses relativistes soulève d’intéressants paradoxes, et fait l’objet
de nombreux contresens d’interprétation. La Relativité Restreinte nous enseigne
que si on utilise une règle le long de la périphérie d’un tel disque, elle subit la contraction de Lorentz, alors que
dans la mesure du rayon, ce n’est pas le cas.
On en déduit que le rapport entre la circonférence et le rayon, ainsi
mesuré, ne sera pas égal à pi. Ce paradoxe fut présenté pour la première fois
par Paul Ehrenfest en 1909 et on l’appelle donc le
paradoxe d’Ehrenfest [1].
{Cet effet se produit, bien entendu quelque soit la vitesse de
rotation du disque, mais l’ampleur de l’effet devient significative à des vitesses
relativistes}
Einstein connaissait ce
paradoxe, et y a fait référence dans son article de 1916, pour justifier la
nécessité d’introduire des géométries non euclidiennes en Relativité Générale
[2]
Mais il n’a jamais proposée
une étude complète de ce cas. D’autres physiciens comme Strauss [3] ont fait
observer que si les règles étaient contractées (de Lorentz), les objets
qu’elles mesuraient l’étaient tout autant, donc que tout cela se compensait et
qu’on devait trouver un rapport C/D égal à pi.
Une autre difficulté, qui
n’aide pas vraiment à y voir clair, est la non transitivité de l’ordre des
événements (posant des problèmes de synchronisation temporelle) le long de la
périphérie du disque
{C’est la clé de la compréhension du « paradoxe »}.
Pour mettre en évidence ce
point simplement, considérons seulement 4 référentiels inertiels (instantanés),
K1, K2,K3 et K4, parmi l’infinité de référentiels
différents possibles.
Voir figure 1
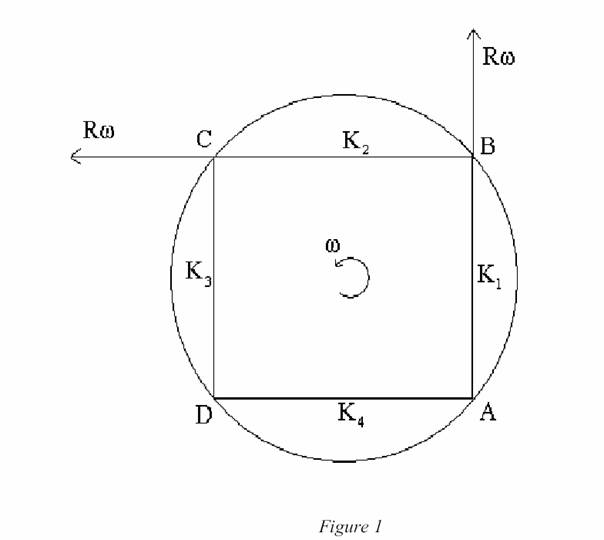
Les lettres A, B, C, D représentent
des évènements (disons l’émission d’un éclair) qui se produisent à la
périphérie du disque.
Supposons que les évènements
A et B soient simultanés dans K1, B et C simultanés dans K2, C et D simultanés dans K4(*).
{ (*)Dans le texte original, il y a écrit K4, je pense que c’est une
coquille, et que c’est K3 qu’il faut lire,comme la suite l’indique }
Si A et B sont simultanés
dans K1, alors dans K2, lorsqu’on fait la transformation de
référentiel K2/K1 on s’aperçoit que A est antérieur
à B du fait du mouvement relatif de K1 par rapport à K2 de A vers B
{Quelques mots pour illustrer sans calcul, l’affirmation : La
simultanéité s’apprécie dans K1 par le fait qu’un
observateur O situé au milieu de AB, va voir les deux éclairs en même temps.
La lumière émise de A, va
dans le même sens que le mouvement relatif de K1 par rapport à K2 dans cette direction, cette lumière émise de A,
va donc à la rencontre des observateurs de K2, c’est pour cela que A va
être vu avant B par les observateurs de K2.Les sceptiques pourront faire le calcul par les
formules de Lorentz qui confirment ce point}
De même dans K3, B va être antérieur à C et dans K4, C va être
antérieur à D,
{ jusque là rien dire}
finalement en faisant la transformation qui nous ramène à notre
point de départ, le référentiel K1, on voit que A est antérieur à D(*).
Donc en faisant le tour du
disque via les quatre référentiels, on voit que A se produit avant B, qui se
produit avant C, qui se produit avant D, qui se produit avant A(**).
Apparemment, une
discontinuité dans le temps s’est produite, et il y a un os dans le potage.
{ Là, notre ami se prend carrément les pieds dans le tapis, en se
contredisant entre (*) et (**) Moi, je
ne vois pas comment il peut affirmer (**), car ce serait supposer que D et A
sont simultanés dans K4, si on suit la même logique, mais on n’a pas la liberté
d’imposer ce choix, on a déjà utilisé tous les degrés de libertés, disons que
cela montre la relativité de la simultanéité,et que dans le cas d’un circuit
fermé comme celui là, on ne peut pas respecter de « symétrie cyclique»
comme la nature du problème incite à le faire. Lorsqu’on revient à son point de
départ, ce défaut est bien mis en évidence puisqu’on ne peut pas continuer le
même procédé, le supposer conduit à une contradiction }
{Cela peut donner quelques migraines, aux tenants de l’espace
absolu, mais les Relativistes savent, qu’en relativité la notion de
simultanéité dépend du référentiel dans lequel on considère les évènements}
Un paradoxe plus fondamental
et plus troublant a été proposé par Selleri dans
l’article cité en référence [4].
Par un raisonnement
élémentaire, on peut montrer, en supposant seulement que la circonférence du disque a une
géométrie bien définie, que le rapport de la vitesse apparente de lumière en
contre- rotation et co-rotation est donné par

où ![]() est la vitesse angulaire supposée constante,
et R le rayon du disque, avec
est la vitesse angulaire supposée constante,
et R le rayon du disque, avec
![]() ,
,
et c+ et c- sont
les vitesses de la lumière en co-rotation et contre rotation respectivement.
Le paradoxe se produit
quand : ![]() et
et ![]() dans
l’équation, (1.1).
dans
l’équation, (1.1).
Alors l’accélération
centrifuge :![]() ,
et ceci, même, si on garde la vitesse tangentielle constante :
,
et ceci, même, si on garde la vitesse tangentielle constante : ![]()
Le référentiel associé
au bord du disque tend vers un référentiel
inertiel, se déplaçant à la vitesse : ![]()
par rapport à un observateur au centre, attaché au
référentiel fixe.
Ceci crée une discontinuité,
car on sait que dans un référentiel inertiel la vitesse de la lumière est la
même dans les deux sens :![]() ,
alors que la formule (1.1) qui reste invariante, du fait de
l’invariance de « v » par ce passage à la limite indique une valeur
très différente.
,
alors que la formule (1.1) qui reste invariante, du fait de
l’invariance de « v » par ce passage à la limite indique une valeur
très différente.
Il y a des confirmations de
l’apparente anisotropie de la vitesse de la lumière sur un disque en rotation.
Si un faisceau laser ( cohérent) est fractionné en
deux faisceaux (cohérents) se déplaçant en sens contraire sur le disque sur la
périphérie d’un disque en rotation rapide (au moyen de miroirs semi
transparents par exemple) et recombiné de façon à faire interférer les deux
faisceaux près du miroir séparateur, un
déplacement de franges d’interférences est observé lorsqu’on modifie la vitesse
de rotation. La différence de temps d’arrivée entre les deux faisceaux [5] est
donnée par

{ Le temps que met la lumière pour faire un
tour en co-rotation, moins le temps pour faire un tour en contra-rotation
vaut le double de la valeur donnée par la formule (1.2) ci
dessus. Par ailleurs, précisons que cette valeur est évaluée dans le
référentiel « repos »}
Cet effet fut remarqué par Sagnac en 1913, et est appelé effet Sagnac.
Certains pourraient penser,
que du fait des « accélérations » rencontrées dans ce problème la
Relativité Générale s’impose. Rappelons que la Relativité Générale est une
théorie de la gravitation, qui n’a pas lieu d’être ici.
La Relativité Restreinte est
parfaitement adaptée au traitement des effets cinématiques et des accélérations
liées à l’utilisation de référentiels en rotation, par exemple, et l’usage du
calcul tensoriel n’est pas réservé à la Relativité Générale. Simplement dans ce
cas, comme on va traiter de référentiels qui ne sont pas tous inertiels, l’espace « global » n’est pas
Minkowskien, il ne l’est qu’au niveau infinitésimal, ce qui permet d’établir
des équations différentielles locales, qui par intégration nous donnera la
solution globale.
2. Premières considérations
L’effet Sagnac,
qui a été largement vérifié en Laboratoire, une expérience ayant même utilisé
la Terre, elle même, comme corps en rotation, paraît être le point le plus
délicat soulevé dans l’introduction.
Ce point a fait couler
beaucoup d’encre. Malykin [6] a passé en revue les
communications sur le sujet et on peut considérer que le point est résolu.
Mon intention dans ce
document n’est pas d’expliquer l’effet Sagnac (cela a
été fait), mais plutôt de clarifier ou d’expliquer les paradoxes concernant ce
sujet.
Le premier contre argument,
est que la RR ne s’applique pas à un disque en rotation, la célérité de la
lumière étant localement anisotropique sur le disque
et que l’addition galiléenne des vitesses est valide dans ce cas.
Au moins un auteur [7] a été
jusqu’à reconstruire une cinématique du disque en rotation à partir du postulat
d’addition des vitesses galiléen en suivant la méthode qu’avait utilisé
Einstein pour établir la RR. Il peut paraître surprenant de trouver cela dans
la littérature, mais en fait ce point de vue est encore enraciné dans certains
esprits.
Nous ne partageons pas cette
approche qui nous paraît physiquement inconsistante. Notre objectif est
d’utiliser un ensemble d’axiomes valables dans tous les référentiels.
Avoir des théories
différentes pour décrire les mouvements rectilignes et en rotation, nous paraît
épistémologiquement pas souhaitable.
Les confirmations expérimentales
de RR nous incitent par ailleurs à bien réfléchir avant d’abandonner cette
théorie à la première difficulté rencontrée, au profit d’une autre théorie ad
hoc.
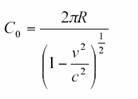
Comme indiqué avant, Einstein considéra le problème. Avec d’autres
physiciens éminents, déclara que la circonférence C était telle que :![]()
Il considéra que la
circonférence dans le référentiel, fixe C0, et la
circonférence du disque en rotation C étaient géométriquement équivalentes.
Comme les règles étalon, à la périphérie du disque subissaient une contraction
de Lorentz, selon la formule habituelle, alors la mesure de la circonférence
vaut :
Ceci ne l’a pas inquiété
outre mesure. Il fit l’hypothèse que le disque devait se plier et se courber de
sorte à satisfaire la contraction de Lorentz.
Indépendamment du côté ad
hoc de l’hypothèse, de telles contorsions violeraient la symétrie supposée du
problème. Si le disque était courbé dans la direction verticale (z+ ou z-) il
induirait une dissymétrie dans cette direction et violerait la symétrie de
parité spatiale des référentiels inertiels.
{Examiner la portée de l’argument. Il faut noter que la courbure
calculée à la fin du chapitre 4 est une courbure 3D. L’argument cité ci dessus
se rapporte plutôt à une courbure 2D. Est il exclu d’avoir une courbure qui ne
viole pas la symétrie de parité ?. Je serai tenté
de mettre cet argument entre parenthèses.}
3. Circonférence mesurée par
différents observateurs
Demandons nous ce qu’un
observateur, au repos par rapport à la périphérie du disque, mesure comme
circonférence. Supposons qu’on a disposé sur le disque, des règles et des horloges, en chaque
point, synchronisées comme on sait le
faire en RR . Du point de vue de l’observateur
immobile au centre O, un point A à la périphérie se déplace à une vitesse ![]() , il va donc mesurer que la longueur
infinitésimale d’une portion de la périphérie vaut :
, il va donc mesurer que la longueur
infinitésimale d’une portion de la périphérie vaut :
Cette contraction n’est pas
physique, cependant car elle dépend de
l’observateur. L’observateur à la périphérie, ne va pas observer de contraction
localement (dans son voisinage immédiat).
Il va constater que son
référentiel « instantané » se déplace à la vitesse ![]() par rapport à O immobile ,
mais va mesurer que la même petite portion de périphérie vaut
par rapport à O immobile ,
mais va mesurer que la même petite portion de périphérie vaut ![]()
Supposons que l’observateur
regarde un autre point B de la circonférence tel que l’angle AÔB = ![]() . Pour un observateur en O, le point A, a une vitesse de :
. Pour un observateur en O, le point A, a une vitesse de : ![]() et le point B a une vitesse de
et le point B a une vitesse de ![]()
{ i et j sont des vecteurs de base orthogonaux
attachés au référentiel fixe en O}

Figure 1A
{ Diagramme du point de vue de
l’observateur en O fixe, les différents référentiels locaux inertiels impliqués
sont :
-
R_0, celui
attaché à O fixe
-
R_A, Celui attaché à A, animé d’une vitesse V par rapport à R_O
-
R_B, Celui attaché à B animé d’une vitesse par
rapport à R_O, et à R_A
-
R_A’, Celui attaché à A’, le
vis à vis de A, mais à l’extérieur du disque, fixe par rapport à R_O.}.
{ la méthode va consister à la vitesse de R_B
par rapport à R_O.
Puis par changement de référentiel,R_O vers
R_A ( on connaît les vitesses relatives), calculer la vitesse de R_B par
rapport à R_A.
Ceci va permettre de déterminer le facteur de contraction de Lorentz
des longueurs de R_B, mesurées
localement par l’observateur B, (on en connaît la valeur c’est R.d(théta) ), telles que les mesure l’observateur A dans
son référentiel R_A, permettant par
intégration le calcul de la longueur de la circonférence de la périphérie du
disque vue par cet observateur A, depuis
le bord du disque en rotation ( on conçoit que la géométrie du cercle est
déformée).
On peut alors aussi calculer cette longueur telle que mesurée par
l’observateur A’ ( référentiel A’),ce qui est fait dans la formule (2.6) puisqu’on connaît la
vitesse relative de A et A’, c’est , V, donc le facteur de contraction
associé : racine ( 1-v²/c²) }.

Figure 1B
{Le point de vue depuis le référentiel inertiel local attaché à A,
considéré comme fixe, montre la transformation à effectuer,( la composition des
vitesses vue de R_A), pour obtenir la vitesse de R_B dans R_A, ici R_A’ n’a pas
été représenté}
Si je transpose cela dans le
référentiel de A (que je distingue en le notant avec des « ‘ » ), nous trouvons que l’observateur en A mesure les
composantes suivantes pour la vitesse.
où nous avons posé ![]() Alors :
Alors :
{ En fait on peut directement appliquer la
formule de composition des vitesses établie par Einstein en 1905 qui est
relatée ci dessous en 2.4, en notant qu’on se place dans le référentiel R_A et
que la composition des vitesses est celle de l’observateur fixe attaché à O qui
a une vitesse – V par rapport à R_A et celle de l’observateur en B qui va faire
un angle pi – théta
avec la vitesse de O }
{ Dans la formule (2.5) en fait, le premier terme
à droite doit être à la puissance – ½ et non pas +1/2. Après c’est correct. Dans la formule (2.6) le
terme racine de (1 -v²/c²), dans l’intégrale,
me semble parachuté, avec les notations de la figure 1A, je suppose
que ce terme doit signifier que
c’est l’observateur A’ qui mesure la circonférence (au repos par rapport
à l’observateur O ), puisqu’il tient compte de la
contraction de longueur liée à son mouvement par rapport à l’observateur A. Si
l’observateur A sur le disque, mesure la périphérie du disque, sur le disque en
rotation lui même, ce qui est évalué à
la fin du chapitre 6, il éliminer ce facteur ce facteur }
Comparons cette
circonférence à celle mesuré par l’observateur fixe, en O

Nous voyons que ![]() Ce que vont mesurer les observateurs va
dépendre de leur position sur le disque, et ils ne seront pas d’accord sur la
valeur de la circonférence.
Ce que vont mesurer les observateurs va
dépendre de leur position sur le disque, et ils ne seront pas d’accord sur la
valeur de la circonférence.
Manifestement, leur
perception variée de ce qu’est la circonférence montre qu’elles ne sont pas
géométriquement équivalentes contrairement à ce que Lorentz, Ehrenfest et quelques autres {dont Einstein ?} prétendaient.
4. Courbure sur le disque
En dépit de la violation de
symétrie de parité, compte tenu de l’apparente nature non Euclidienne de la
surface d’un disque en rotation rapide, demandons nous s’il possède une
courbure gaussienne ( intrinsèque). Compte tenu de la symétrie du problème, on
est incité à travailler en coordonnées cylindriques.
Partons d’un espace temps
plat.
Où, ![]() et
et
![]()
Pour un observateur situé à
l’origine ( en O), la transformation de coordonnées entre le référentiel
inertiel de départ et un référentiel attaché au disque tournant à vitesse
angulaire constante oméga est ( immédiatement) donné par
En utilisant l’invariance de
l’intervalle d’espace temps
![]()
où ![]() est
le temps propre d’une particule au repos dans le référentiel, et
est
le temps propre d’une particule au repos dans le référentiel, et
![]()
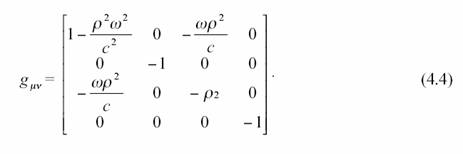
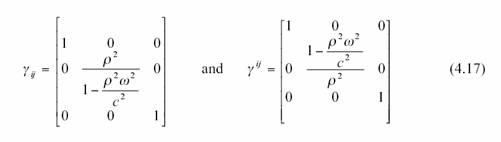
nous trouvons que
![]()
on peut en synthétiser la métrique des coordonnées
« ‘ » dans le tableau suivant
Supposons que :
![]()
comme c’est le cas pour un point au repos, en particulier
sur la circonférence du disque, nous trouvons :

Ceci est la dilatation
temporelle de Lorentz classique.
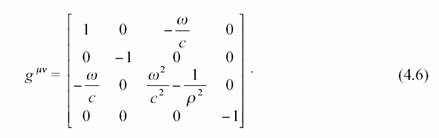
Calculons le tenseur métrique inverse
Avec tout cela, on peut
calculer les symboles de Christoffel par la formule :

où ![]() est
l’abréviation de
est
l’abréviation de ![]() ,
Ils valent :
,
Ils valent :
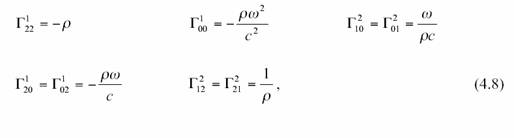
{ j’en ai vérifié un au hasard, c’est bon}
Tous les autres symboles
sont nuls. Si on transforme cela en coordonnées cartésiennes, on trouve :
{ A priori, je ne voit pas l’intérêt de faire
cela, pourquoi ne pas considérer l’équation géodésique en coordonnées
cylindriques qui paraissent mieux adaptées. A par cela ce qui suit ressemble à
ce qu’on s’attend à trouver}
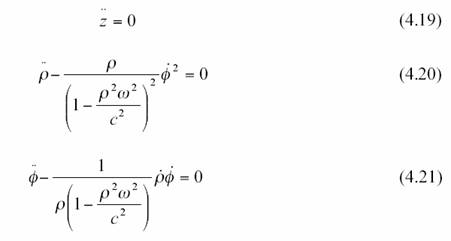
Utilisons les dans
l’équation géodésique des espaces courbes.

Nous obtenons les
géodésiques exprimées en coordonnées cartésiennes sur le disque en rotation.
où les points dénotent la différentiation ( jouent le
rôle des « ‘ ») par rapport à un paramètre affine de la courbe
(typiquement de temps propre). L’équation (4.11) implique que t’ = constante. Utilisant cette propriété, en multipliant par
la masse m de la particule, on peut réécrire les équations (4.12)-(4.14) comme
suit :
ou en utilisant la notation vectorielle 3 D

Ce qui l’équation du
mouvement d’une particule libre dans un référentiel en rotation uniforme. On
voit qu’un observateur qui utilise la coordonnée t comme temps «ressent » des pseudo- forces centrifuge et de Coriolis.
Remarquons que ces pseudo-forces ( la gravitation,
sil y en avait, en serait aussi) sont implicitement la manifestation de la
présence de dérivées secondes de la métrique dans l’équation du mouvement.
En utilisant (4.7) ou (4.8) on peut calculer et vérifier
que le tenseur de Riemann ![]() 0, ce qui montre que l’espace est plat, ce qui
n’est pas surprenant , puisqu’on l’a choisi plat au départ et qu’on n’a fait
que le décrire dans un autre système de coordonnées. Les équations du champ en
Relativité générale stipulent que seule la présence de matière- énergie ( un
champ électromagnétique fait l’affaire) est capable de déformer l’espace temps
en un système fermé, et dans l’analyse , le disque a été supposé
implicitement , sans masse infiniment
fin et tournant à vitesse constante.
0, ce qui montre que l’espace est plat, ce qui
n’est pas surprenant , puisqu’on l’a choisi plat au départ et qu’on n’a fait
que le décrire dans un autre système de coordonnées. Les équations du champ en
Relativité générale stipulent que seule la présence de matière- énergie ( un
champ électromagnétique fait l’affaire) est capable de déformer l’espace temps
en un système fermé, et dans l’analyse , le disque a été supposé
implicitement , sans masse infiniment
fin et tournant à vitesse constante.
Cependant on peut séparer
l’espace temps en espace et en temps.
Considérons deux points sur le disque A et B séparés par une faible
distance dxi ( i = 1,2,3) .
Une règle attachée à A, à la limite de la séparation tendant vers zéro,
va pratiquement être au repos par rapport à B.
On peut séparer les parties
spatiales et temporelles ( voir Moller
[8]).
{ On peut aussi voir, Landau Lifchitz,, et cela donne la même chose , et c’est du
béton }
Bien entendu cette
séparation n’est valable que localement. Moller donne
la partie spatiale de ![]() comme
suit :
comme
suit :

En reportant la métrique précédente
dans cette formule on obtient pour la métrique spatiale :
et pour les symboles de Christoffel

{ Comme tout à l’heure j’en ai vérifié un, c’est bon)
Tous les autres symboles
sont nuls. Alors l’équation géodésique devient
Là, Moller
calcule la somme des angles internes d’un triangle définis par de telles
géodésiques, et utilise le résultat pour en déduire la courbure gaussienne,
mais il est plus classique de calculer la courbure directement, ce que nous
faisons. Rappelons que le scalaire de courbure ( scalaire
de Ricci) est défini par :

et le tenseur de Ricci par

le scalaire de courbure vaut :

Il est toujours positif,
comme dans le cas d’une sphère. Ceci est cohérent avec le fait que sur une
sphère la circonférence est inférieure à ![]() ,
par un facteur qui dépend de la position de l’observateur.
,
par un facteur qui dépend de la position de l’observateur.
{Calculer le scalaire de courbure est une méthode béton pour évaluer
la courbure. J’ai calculé ce scalaire, je le trouve égal à l’opposé de ce qui
est indiqué ici (même valeur absolue, signe « moins », donc je
trouve une courbure négative). Le résultat de mon calcul est en accord avec les
indications du Landau Lifchitz, obtenues à partir de
considérations directes sur la métrique, qui est exactement la même, la
courbure intrinsèque 3D spatiale est négative. Attention, il s’agit d’une
courbure spatiale intrinsèque 3D et non pas 2D
Je pense que l’auteur se trompe ici. Le commentaire qui suit est
naturellement erroné..Je pense qu’il voulait justifier
les résultats obtenus au chapitre 2,
notamment par les formules (2.4)-(2.7). En fait le résultat trouvé ici
n’est pas en contradiction avec ces formules, s’agissant de choses différentes
et étant évaluées dans des référentiels différents. Le scalaire de Ricci 4D est
lui invariant par toutes les transformations de coordonnées puisque c’est un
scalaire,( d’ailleurs dans notre cas , il est
nul) mais pas le scalaire de Ricci de la partie spatiale seulement qui dépend du
réfrentiel choisi... Ce point est important si on
veut y comprendre quelque chose. D’ailleurs l’auteur semble succomber à cette
confusion, puisqu’il s’interroge sur la « réalité » de cette
courbure spatiale qui essaie d’évacuer par des arguments parfois laborieux et
où il n’évite pas des « contradictions » }
5. Synchronisme sur la circonférence
du disque.
L’effet Sagnac,
et en fait toutes les menues contrariétés que nous avons endurées tout au long
de ce document, ont leur source dans l’impossibilité de synchroniser les
horloges sur le disque en utilisant la seule méthode possible, permettant aux
observateurs de s’accorder, celle définie en Relativité Restreinte. Dans
l’introduction nous vous avions déjà signalé la non transitivité de la
procédure de synchronisation à la périphérie du disque. Evaluons ce défaut de
synchronisation.
Imaginons deux évènements A
et B, simultanés dans un référentiel K, attaché à la périphérie du disque en
rotation, séparé par une distance dx. Regardons ce
qui se passe du point de vue d’un référentiel adjacent K’ (fixe) :
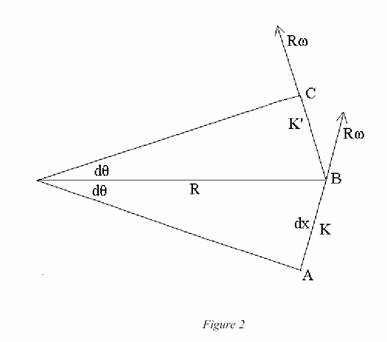
On peut évaluer le temps
séparant A et B dans le référentiel K’ par les transformations de Lorentz.

{ Attention ! « dt ’ », est le temps
« dt » qui s’écoule sur le
référentiel en rotation ( le disque) mais évalué par un observateur
« fixe » attaché au référentiel K’. Si le disque a une
vitesse « v » par rapport au référentiel « fixe », la
vitesse relative de K’ par rapport à K est alors de – v, d’ou la forme de la
formule avec le signe + ( c’est la formule réciproque de la formule de base).
Dans ce cas, gamma = racine de ( 1-v²/c²) grandeur constante , l’intégration sur 2pi est
immédiate et donne (5.2)}
Considérons maintenant la
différence de temps entre B et C, dans un troisième référentiel infinitésimal
et procédons ainsi de proche en proche tout le long de la circonférence du
disque. En intégrant la vitesse de 0 à ![]() on
voit qu’il existe une différence de temps lorsqu’on fait le tour du disque.
on
voit qu’il existe une différence de temps lorsqu’on fait le tour du disque.
qui correspond précisément à la moitié ( du fait qu’on ne
fait pas interférer des faisceaux en sens contraire) de ce qui est mesuré par
l’effet Sagnac sous forme de différence de phase
entre les faisceaux co et contra rotationnels.
[4][5][6]
Nous voyons que la
désynchronisation, est fondamentalement une
manifestation différente du paradoxe des jumeaux. Comme dans le paradoxe des
jumeaux c’est le changement de référentiel qui est à la source de la
discordance, bien qu’ici, par rapport, à la version de base ou le demi tour est
instantané (mais le demi tour, comme l’accélération de départ et d’arrivée
peuvent être également continus, sans que cela ne change le principe), le changement de référentiel est infinitésimal et continu.
Signalons également que la différence de
temps entre celui marqué par une horloge qui a voyagé autour du disque et une
qui est restée au repos par rapport au
disque est effet objectif (puisqu’on se retrouve au même point, comme dans le
cas du paradoxe des jumeaux au retour). Malgré les désaccords sur la notion de
simultanéité des différents observateurs, ceux ci s’accorderont par contre sur
la désynchronisation objective qui se produit après un tour.
6.1 Sources de courbure
En l’absence de matière et autres sources
gravitationnelles, à ce point on peut se demander après le calcul de la
courbure spatiale ( 4.22), d’où elle vient. Est elle
«réelle» ?.
{ Voir commentaires fin du chapitre 4 : Elle dépend du système
de coordonnées choisie, elle n’a pas de caractère courbure géométrique
invariante, au sens d’une courbure espace temps)
Dans l’espace à 3+1 dimensions où nous avons
nos habitudes de pensée, ce n’est pas très clair, mais dans l’espace temps de
la RR à quatre dimensions ce n’est pas ambigu. On peut éclairer le débat en
traçant un simple diagramme d’espace temps. Comme le disque est supposé
infiniment fin, et que rien ne se produit dans la direction « z »
nous pouvons supprimer le troisième dimension et traiter le problème en deux
dimensions (spatiales), ce qui permet d’utiliser la dimension libérée pour
représenter l’évolution temporelle.
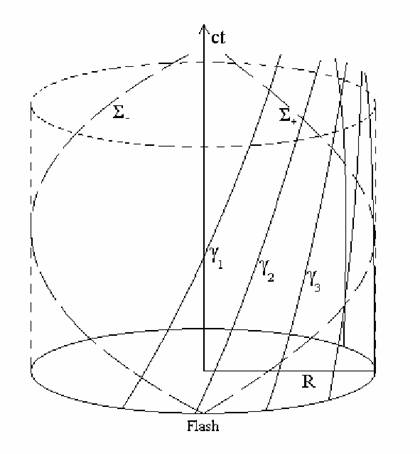
Comme montré sur la figure
3 ci dessus, {et non pas figure 4}
(empruntée à [5]), les lignes d’univers les points de la périphérie du disque, dénotées ![]() ,
etc.. sont des hélices de
type temps, comme de bien entendu, car des particules massives ne peuvent pas
aller plus vite que la lumière. Les chemins
,
etc.. sont des hélices de
type temps, comme de bien entendu, car des particules massives ne peuvent pas
aller plus vite que la lumière. Les chemins ![]() et
et ![]() associés
aux rayons lumineux issus d’un éclair
lumineux et se propageant en sens contraire sont aussi des hélices, mais de
type lumière comme il se doit, s’enroulant en sens contraire autour tu tube
d’univers tracé par le disque. Ceci est en général admis et pas controversé
dans la littérature.
associés
aux rayons lumineux issus d’un éclair
lumineux et se propageant en sens contraire sont aussi des hélices, mais de
type lumière comme il se doit, s’enroulant en sens contraire autour tu tube
d’univers tracé par le disque. Ceci est en général admis et pas controversé
dans la littérature.
Le problème se corse quand
on essaie de définir le lieu des « simultanéités » correspondant à
la périphérie du disque. En utilisant la définition de la RR de la
simultanéité, les évènements simultanés à un éclair vont être orthogonaux aux
lignes d’univers de l’observateur en question (dans ce cas, un observateur
chevauchant l’onde électromagnétique produite par l’éclair). L’intégration que
nous avons faite au chapitre 5, est vue
comme mesurant une courbe ouverte de type espace dans l’espace temps.
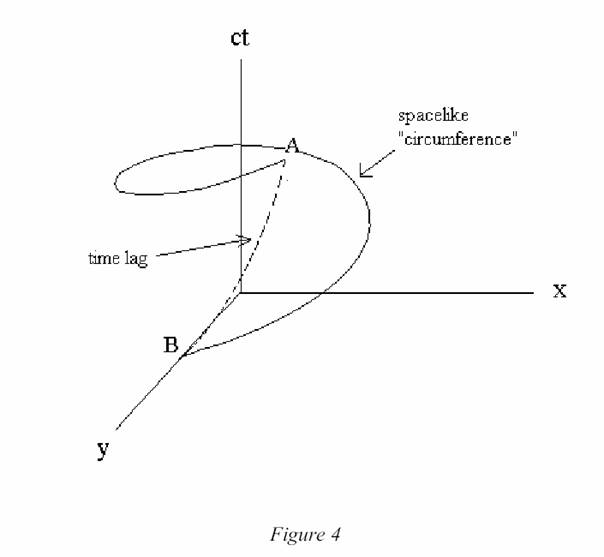
De la figure 4, il ressort
que l’extrémité d’un ruban, appliqué sur la périphérie du disque ne va pas
rejoindre l’autre extrémité au même point temporel. Les deux extrémités vont
être séparées par une ligne d’univers de type temps dont la longueur est donnée
par l’équation (5.2){ Homonomie de la boucle}. Quand ![]() ,
les lignes d’univers des points à la périphérie du disque, sont des droites et
le lieu des évènements simultané à l’éclair
est une courbe fermée de type espace.
,
les lignes d’univers des points à la périphérie du disque, sont des droites et
le lieu des évènements simultané à l’éclair
est une courbe fermée de type espace.
Mais dès que le disque est
mis en rotation, et devient une courbe ouverte, de sorte que la notion de
simultanéité devient conventionnelle, dépendant du point de départ de
l’intégration effectuée au chapitre 5. Remarquons aussi, qu’en combinant les
figures 3 et 4, l’angle que les faisceaux lumineux ![]() et
et
![]() font avec les
font avec les ![]() de type temps ( dans
la figure 3) est égal à l’angle entre les rayons et la «circonférence» (dans la figure 4) : Ceci est évidemment dû au fait que la vitesse
de la lumière mesurée dans les référentiels tangents inertiels est égale à
« c ».
de type temps ( dans
la figure 3) est égal à l’angle entre les rayons et la «circonférence» (dans la figure 4) : Ceci est évidemment dû au fait que la vitesse
de la lumière mesurée dans les référentiels tangents inertiels est égale à
« c ».
Alors que ceci est plutôt
clair dans l’espace temps 4D , il est moins évident de
dire ce que ceci signifie pour un
observateur sur le disque.
Considérons un observateur
muni, comme d’habitude, d’un nombre
infini de minuscules petites règles et de deux horloges identiques
synchronisées. Quand il voyage le long du bord du disque, à vitesse non
relativiste ( par rapport au bord du disque), il
dépose ses règles étalons et transporte une horloge avec lui. Lorsqu’il atteint
de nouveau son point de départ, il va conclure que la circonférence
correspond au nombre de règles étalons qu’il a déposé, soit :
 .
.
Cependant, il va constater que son horloge
retarde par rapport à celle qu’il a laissé sur place d’une valeur donnée par
(5.2).
Nous voyons donc, que la
courbure obtenue par la méthode suggérée par Moller
est résulte du fait qu’on force artificiellement les points A et B dans la
figure 4 à être réunis.
{On procède à une identification des points représentant les
extrémités, comme cela se fait dans les espaces-temps « compacts ».
Le disque en rotation est un espace temps compact. Il faut donc prendre en
compte ce qu’on appelle « l’holonomie » de la boucle pour que cette
indentification liée à la compacité de l’espace se fasse correctement.
Cette remarque s’applique évidemment à toute la classe de problèmes
qui mettent en jeu des boucles dans l’espace-temps. Le paradoxe de Langevin par
exemple, dans sa version classique possède cette caractéristique. L’holonomie
est alors constaté par la différence de temps propre entre les jumeaux.
Formellement ceci peut être vu comme une conséquence du théorème de
Stockes :dans une variété Riemannienne la circulation, d’une (n-1)_ forme
linéaire M le long d’un contour fermé,
délimitant une surface est égal à l’intégrale de surface « flux » de la n_ forme dérivée dM
. Cette intégrale est nulle seulement si la n-1 forme est exacte ou fermée }
7. Conclusion
Comme beaucoup de paradoxes,
le paradoxe d’Ehrenfest naît de l’absence de notion
de simultanéité absolue en Relativité. Il est clair que la plupart des
physiciens qui ont étudié le disque en rotation, ont implicitement supposé que
la circonférence du disque en rotation avait une géométrie bien définie. Cependant en s’appuyant sur des diagrammes de
Minkowski, plutôt simples, on voit qu’une définition naturelle et cohérente de
la simultanéité pour l’ensemble de la périphérie du disque n’est pas possible,
ceci étant très caractérisé pour des rotations rapides. Si on décompose
l’espace temps en temps et espace, les résultats de calculs ne vont pas
permettre une vérification expérimentale ( en fait
c’est ainsi que la courbure calculée au chapitre 4 apparaît)
Le plus simple est encore de
voir les paradoxes du disque en rotation comme une déclinaison du paradoxe des
jumeaux. C’est dans le changement
incessant de référentiel de référence que le temps se « perd ».
Citons Rizzi
et Tartaglia [5]
« Un disque en
rotation n’admet pas de « référentiel ( global)
propre » bien défini. Il faut plutôt regarder cela comme une classe de référentiel
constitué d’un nombre infini de référentiels locaux propres considérés aux
différents points à différents instants et assemblés selon certaines
règles »