Commentaires
de lecture sur : géométries, 1-
Relativité restreinte
Ref
: http://spoirier.lautre.net/intro.ps.gz,
http://spoirier.lautre.net/physique.ps.gz
L'idée
est que le même formalisme peut s'appliquer à des géométries différentes.
Nous
sommes familiers avec la géométrie Euclidienne, où les notions de longueurs
d'un segment, d'angle , de produit scalaire sont immédiates à notre imagination
et peuvent être facilement représentées dans un système cartésien.
.
Ces
notions ne sont que des cas particuliers de concepts existants ( liés la
métrique en particulier) dans une variété de géométries.
Dans
le cas de la Relativité restreinte, la géométrie associée à la métrique
est "plate" , comme la métrique Euclidienne, c.a.d que
ses coefficients ne dépendent pas des coordonnées ( métrique "
hyperbolique" , Lorentzienne ou de Minkowski) , et correspond donc à un
cas relativement simple, même si le ds² caractérisant sa métrique en
coordonnées cartésiennes fait apparaître une signature diagonale (-c²,+1,+1,+1)
ou l'inverse selon les conventions au lieu de (+v²,+1,+1,+1) pour la géométrie
Euclidienne (en coordonnées d'espace).
A
cette différence près les résultats de la géométrie Euclidienne écrits sous
leur forme générale faisant intervenir la métrique peuvent se transposer (
vérifier que cela à un sens dans l'autre géométrie).
Pae
exemple la norme d'un vecteur ( auto produit scalaire U²) , ou plus
généralement le produit scalaire de deux vecteurs U et V fait intervenir la
Métrique : U.V = Um gmn .V n
Avec
les notations habituelles.
On
peut aussi visualiser les échelles différentes des différentes coordonnées (
temps et espace) sur le diagramme représentatif du phénomène étudié pour plus
de "conformité" du dessin au phénomène;
Entre
la métrique de Minkowski et la métrique Euclidienne on voit que la seule
différence est relative au coefficient du temps qui vaut -c², au lieu de +v² en
coordonnées d'espace.
Pour
l'homogénéïté, la coordonnée temps est affectée d'un coefficient v de Vitesse,
on voit que comme les règles opératoires sont les mêmes entre les deux
métriques, pour tout ce qui concerne les calculs de grandeur faisant intervenir
la métrique, il suffira à la fin des calcul de remplacer v² par -c² et de
rendre l'expression cohérente ( trigonométrie hyperbolique correspond à la
trigonométrie classique sur des arguments imaginaire) pour obtenir
rigoureusement le résultat.
Donc
en résumé.
1-
établir une correspondance ( rigoureuse) entre une description du problème dans
un contexte intuitif ( problème de
géométrie Euclidienne) et le problème à traiter dans son contexte théorique
physique. Ceci se manifeste par une transformation
2-
Résoudre le problème dans son contexte de géométrie Euclidienne où l'intuition
est d'un grand secours
3-
Utiliser la transformation établie plus haut pour obtenir le résultat dans le
contexte physique.
Vérification
de l'exemple p.9 ( courbe à accélération constante)
Application
sur l'exemple du document cité en référence ( extrait ci dessous)
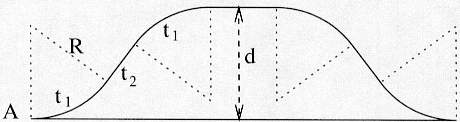
Diagramme représenté en espace Euclidien
à deux dimensions ( plan)
![]()
 B
B
Terre
Pendant la durée de la
poussée provoquant une accélération constante g, le véhicule parcourt un arc de
cercle de longueur t1,(
temps "propre" du voyageur) en unité de temps ou vtl en unité d'espace, d'angle a = t1. g (ce qui donne en radians a.k = tlg.v-1,
on rappelle que v ² = k-2 ) et de rayon (en unité d'espace) R =
v ². g- 1 .
Par des considérations
simples sur la figure, on déduit:
d = 2R(l - cos(a.k)) + vt2 sin(a.k) = 2v²g-1(1
- cos(k.t1g)) + t2k-1 sin(k.t1g)
Transposé en espace de
Minkowski par v ² = k-2 = -
c² , on obtient le résultat au problème de relativité :
d = 2c²
g-1 (ch(tlg/c) - 1) + ct2 sh(tlg/c)
Même calcul pour la
différence de longueur temporelle entre
la courbe et la ligne droite
Dt = 4(t1 - kR.sin(ka)) + 2t2(l -
cos(ka)) = 4(t1
- c.g-1 sh(tlg/c)) + 2t2(l -ch(tl.g/c))
Ce qui est négatif, compte tenu que la
ligne doite en espace de Minkowski est plus longue que la ligne courbe.
Calcul analytique de la
partie courbe à partir des formules de Lorentz.
La
similitude entre un opérateur décrit par de matrice de rotation en espace
Euclidien (conservant le ds²) et l'opérateur matriciel associé au groupe de
transformation de Lorentz (conservant également le ds² mais dans un espace de
Minkowski dit hyperbolique) est en général soulignée. Il faut dire qu'elle
saute aux yeux ( on remplace les fonctions trigonométriques par leurs
équivalentes hyperboliques pour tenir compte de la signature de la métrique )
Si
on part de la formule de Lorentz sous la forme matricielle et qu'on s'intéresse
à x,t seulement, on a :
cdt' = cosh j.c.dt - sinh j.dx (1)
et dx' = - sinh j.cdt + cosh j.dx, (2)
Pour
avoir le temps propre on pose x' =0, donc dx' =0, on applique dans (2) et on
reporte le résultat dans (1), après un calcul élémentaire il vient:
dt/dt' = cosh j (3)
avec
tanh j = v/c, donc en principe j = argtanh v/c. (4)
Ces
formules sont valables pour deux référentiels quelconques animés d'une vitesse
relative constante v selon l'axe des x,x' parallèles.
Elle
s'applique dans notre cas ( accéléré) qu'à un instant infiniment court dt, dt'
(autour du temps t, t') ou l'on suppose la vitesse relative est constante.
En
fait on voit que t et t' sont la somme intégrale des dt et dt' correspondants
aux différentes valeurs de j au cours du temps ( j varie puisque le système t' accélère, cf
définition de j ) .
Reste
à déterminer la variation de j fonction de t'.
Si
on considère deux instants infiniments voisins du système en accélération t' et
t'+ =t' +dt', les formules (1) et (2) s'appliquent donnant le
rapport entre dt' au temps t' et dt'+
au temps t'+ et que l'on examine la variation dj de j il vient de (4):
dj = argtanh dv/c avec dv = gdt'
soit en approximant argtanh gdt'/c au premier
ordre par gdt'/c
dj = gdt'/c
j = gt'/c , la variation de l'angle est une
fonction linéaire de t'
en
reportant dans (3) on obtient:
dt/dt' = cosh gt'/c
En
intégrant de t= 0 à t1 et de j =0 à gt'1/c, on a t1
= t'1 . c.g-1( sinh g.t'1/c) d'où on déduit Dt .
Pour
la partie linéaire l'application de la formule (3) donne directement le
résultat escompté.