Table des matières
Pourquoi des tenseurs en RG ?
Changement de coordonnées
locales
Notion de Tenseur :
Construction de l’objet géométrique « tenseur »
Espace Vectoriel
Espace vectoriel dual
Notion de tenseur, exemples
Présentation physique :
Utilisation des « tenseurs »
Scalaire : Tenseur d’ordre zéro
Vecteurs : Tenseurs d’ordre un
Tenseurs d’ordre deux,
et plus
Tenseurs d’ordre deux et Matrices
Opérations sur les tenseurs
Le tenseur métrique, exemples
Dérivation de tenseurs, la
dérivée covariante, la connexion métrique
Exemples de tenseurs
importants en RG
L’équation tensorielle de la
RG développée
Annexe : L’équation
géodésique
Exercice : La dérivée
covariante
Pourquoi des tenseurs en RG ?
Le « principe* de
Relativité Générale » stipule que les lois de la physique peuvent être
décrites dans n’importe quel référentiel (inertiel ou non inertiel).
Si on a écrit ces lois dans
un référentiel, pour les transposer dans un autre référentiel, il faut opérer la
transformation de « coordonnées » correspondant au passage de
l’ancien système de coordonnées vers le nouveau.
L’objectif recherché est de
trouver une formulation des lois qui fasse que par n’importe quelle
transformation de coordonnées (locale, car les lois de la RG s’expriment par
des équations différentielles locales, en vertu du principe d’équivalence), la forme
de lois soit conservée : Si une relation entre des paramètres
existe dans un référentiel, la même relation entre les valeurs (différentes) de
ces mêmes paramètres existe dans les autres. Il se trouve que les
tenseurs possèdent précisément de cette propriété.
Autrement dit : Si
j’arrive à écrire une loi en RG sous forme de relation entre tenseurs, si elle
est vraie dans un système de coordonnées (un référentiel quelconque), alors
elle est vraie dans tous ! On dit alors que ces équations sont «
généralement covariantes »
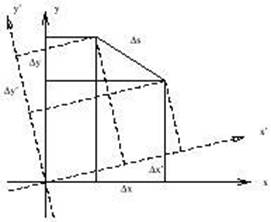
Changement de coordonnées locales dans un espace
quelconque
Quelques rappels :
Le tenseur métrique détermine
localement, un invariant ( ds²) :
Dans un espace plat, le
tenseur métrique est indépendant du point l’espace
Dans un espace courbe, le
tenseur métrique dépend du point. (On y reviendra ..)
Notion de tenseur : Construction de l’objet
géométrique « tenseur »
Espace vectoriel En
C’est un ensemble d’objets
(vecteurs) V, qui peuvent être comparés, additionnés (muni d’une structure de
groupe) et multipliés par des nombres réels (corps) de façon linéaire. Soit V
et W deux vecteurs de cet ensemble et a et b deux nombres réels:
(a+ b).( V + W) = a.V + b.V + a.W
+ b.W. (1)
Le nombre de vecteurs
linéairement indépendants (n) définit la
dimension de l’espace Vectoriel. Les vecteurs définis dans cet espace vectoriel
sont dits « contravariants »
Un jeu de n vecteurs
linéairement indépendant définit une base ( ê0, …êµ,…ên).
On définit par Vµ les « composantes » d’un vecteur V, conformément à (1), par :
V =Σµ =1 à n (Vµ. êµ
) = V0. ê0+V1. ê1+ …+Vn.
ên = Vµ. êµ (Convention d’Einstein) (2)
Pour simplifier la notation, on ne fait
référence en général, qu’aux composantes des vecteurs (la base est sous
entendue)
Nous sommes tellement habitués à l’isomorphisme entre notre
espace physique et R3, qu’on en oublie combien cette idée d’associer
à chaque point de l’espace des coordonnées et de transformer un problème de
géométrie en un problème de calcul sur R3 a été une percée non
triviale.
Soit un vecteur V de cet
espace vectoriel ( qu’on appelle vecteur contravariant en abrégé ou vecteur
tangent, ou tout simplement « vecteur ») de composantes
contravariantes Vµ dans un système de coordonnées local C1( xµ).
Evaluons les composantes Vµ ’ de ce
même vecteur V, dans un autre système de coordonnées C2 (x’µ ) au
même point, alors la loi de transformation la plus générale (valable dans
n’importe quel espace) est :
Vµ ’ = (∂ x’µ
/∂ xµ) . Vµ (3)
Il suffit de remarquer que c’est le même vecteur qui
est décrit dans les 2 bases, et évaluer les vecteurs ( êµ ) de la
base d’origine dans la seconde (êµ’) et de substituer.
V = Vµ. êµ = Vµ’. êµ’ (4)
Avec êµ =
(∂ x’µ /∂ xµ) êµ’ (5)
On les appelle
« contravariants » du fait que la loi de transformation des
composantes est l’inverse de la loi de transformation des vecteurs de base.
Espace vectoriel dual En
Sur l’espace vectoriel En défini
précédemment on peut définir une forme linéaire F (vecteur dual ou
vecteur à composantes covariantes, vecteur covariant en abrégé, ou vecteur
cotangent), telle que si on a deux
vecteurs ( contravariants) V,W et deux nombres réels a,b, on a :
F ( aV +bW) = aFV + bFW = R (
R est un nombre réel) (6)
Une forme linéaire appliquée sur un vecteur produit un
nombre.
Comme V = Vµ.
êµ -> F.V =
Vµ .F ( êµ) (7)
On voit que F ( êµ) est la composante Fµ,
correspondante à êµ, de la
forme linéaire
En pratique, on peut s’arrêter là. Exemple :
trouver la forme F qui aux vecteurs
(4,2,0), ( 1,2,-3), (0,2,5) de R3 associent
respectivement les scalaires (2,-7,-1)
4.F (e1) + 2 .F(e2) =
2
1.F(e1) + 2.F(e2)
– 3 F(e3) = -7
2.F(e2) + 5.F(e3) =
-1
On trouve: F(e1) = 2, F(e2) = -3, F(e3)
= 1
Pour être Formel, on va introduire des vecteurs de
base de cet espace dual:
Définissons ω
ν comme une base de cet espace dual par : ων .êµ
= δµν
δµν est le symbole
de Kronecker qui vaut 1 si µ = ν et 0 autrement
F s’écrit alors
Fν ων où (7)
s’écrit F.V = Vµ Fν .ων
.êµ = Vµ Fν.δµν
(8)
Ces formes linéaires forment un ensemble muni d’une
structure d’espace vectoriel de même dimension n noté « En » (satisfont
aux axiomes d’espace vectoriel)
Sans refaire tous les calculs on montrerait (
exercice) que pour un vecteur « covariant » (noté maintenant Vµ pour homogénéiser la notation ), la loi de
transformation est :
Vµ ’ = (∂ xµ /∂
x’µ) . Vµ
On a : Vµ . Vµ= Scalaire ( Invariant par transformation de coordonnées) (9) A noter que le dual du dual est l’espace d’origine.
Nous avons maintenant les briques de bases pour
introduire les tenseurs
Notion de tenseur
Produit tensoriel : Soit deux
espaces vectoriels En à n
dimensions et Em à m dimensions
Soit un vecteur V = Vµ. êµ , appartenant à En
Soit un vecteur W = Wν. êν , appartenant à Em
t00 = V0.W0,
t01 = V0.W1, …. T22 = V2.W2.
On définit le tenseur T tel que T = V *W ( l’opérateur
« * » dénote le produit
tensoriel) de la façon suivante :
Les composantes Tµν = Vµ * Wν
de ce tenseur sont tous les produits croisés des composantes des vecteurs ( n.m composantes)
La « base » de ce tenseur est le produit
tensoriel des vecteurs de base êν *êµ ( n.m)
T est un objet
de l’espace Tensoriel En *
Em , produit tensoriel des espaces vectoriels En et
Em .
Loi de transformation : On voit
que par construction le loi de transformation des tenseurs va être le produit
de celles des vecteurs ( contravariants ou covariants)
Tµ’ν’ = (∂ x’µ /∂ xµ)
(∂ x’ν /∂ xν) Tµν (10)
Pour un tenseur
deux fois contravariant
Exemple
Un tenseur deux fois contravariant (µ,ν) , à 4
dimensions pour chaque indice (µ et ν varient indépendamment de 0 à
3 : espace temps de la RG), est un objet mathématique à 16 composantes (
scalaires, ou fonctions s' il existe un espace vectoriel en chaque point de
l'espace temps) qui peut être visualisé par exemple sous forme d'un tableau
4x4
êT00 T01 T02 T03 ê
êT10 T11 T12 T13 ê
Tµν
= êT20 T21 T22 T23 ê = Vµ
* Wν
êT30 T31 T32 T33 ê
V0 * W0 = T00
, V0 * W1 = T01 , …., V3 * W3 = T33
Cette construction peut évidemment être généralisée à
un nombre quelconque de produits tensoriels d’espaces vectoriels et d’espaces
vectoriels duals. On va définir un tenseur p fois contravariant et q fois
covariant par sa variance ( p,q) et la dimension (n) de l’espace vectoriel de
chacun des indices. En RG cette dimension est quatre pour tous les indices.
Exemple : tenseur
2 fois covariant ( antisymétrique de surcroît)de l’électromagnétisme
Chaque composante Fµν = ∂νAµ-
∂µAν dérive d’un quadri-vecteur potentiel Aµ.
Avec ce tenseur, les lois de Maxwell s’expriment très
simplement. L’invariance de jauge par la substitution Aµ -> Aµ + ∂µ F saute aux
yeux .
A noter, que dans notre première
approche « mathématique », nous avons « construit
l’objet géométrique » tenseur, qui jouit par construction de certaines
propriétés, nous allons en physique, souvent oublier cette construction pour ne
nous intéresser qu’aux propriétés de transformations vis à vis des transformations
de coordonnées.
Scalaires ( Les scalaires sont des
tenseurs !)
Ce sera notre premier tenseur, le plus
simple, mais pas le moins important, il est de variance (0,0)
En établissant l’expression de
l’intervalle ds², dans un référentiel arbitraire {Xi}, on a
implicitement postulé l’invariance de la valeur numérique du ds², lors d’un
changement de référentiel ( x’µ au lieu de xµ).
L’intervalle ds² est un scalaire, c.a.d la
donnée en chaque point de l’espace temps d’un nombre indépendant du choix d’un
référentiel particulier.
De façon générale on appelle scalaire tout
champ S(x) tel que dans un changement arbitraire de référentiel produisant S’
(x’) on ait : S(x) = S’ (x’).
On peut facilement construire d’après (9) des
scalaires ( invariants ) en « combinant* » par exemple un vecteur** contravariant et un vecteur** covariant.
· * En fait c’est le produit scalaire
« généralisé » en Relativité.
· ** Les vecteurs sont des tenseurs comme
on va le voir.
Les Vecteurs (
les vecteurs sont des tenseurs)
Quadrivecteur contravariant : tenseur de variance (1,0)
On suppose maintenant connu la notion de vecteur
défini dans un espace vectoriel, ensemble dont les éléments sont les vecteurs
muni d'une relation d'égalité, d'une loi
interne d'addition commutative, associative munie d'un élément neutre et d'un
inverse et d'une loi externe de multiplication par R, corps de réels (distributive,...).
Le qualificatif contravariant vient de ce que, lors
d'un changement de base les coordonnées (xµ) varient selon la transformation
inverse de celle des vecteurs de la base (êµ).
En physique ( en RR en particulier), un champ de
(quadri)vecteurs a un caractère intrinsèque qui peut être défini
indépendamment du référentiel :
Exemples
Vecteur quadri vitesse Uµ = dxµ/dt avec dt invariant car : dt = ds²/c².
Vecteur quadri énergie-impulsion ( remplace l’énergie
en RR) qui par « produit scalaire » va produire le scalaire « m.c² » ( invariant
en RR) indiquant l’invariance de la masse relativiste ( contrairement aux idées
reçues, la masse est un invariant en RR)
Autre définition d’un tenseur contravariant (
défini par ses propriétés vis à vis des transformations): Tout objet défini par
rapport au système de coordonnées ( base d’un espace vectoriel de dimension 4
dans ce cas) par 4 grandeurs Aµ et qui se transforme selon la loi: A'µ= (¶x'µ/¶xν).Aν (11)
est aussi appelé quadrivecteur ( tenseur de variance
1,0) contravariant
Quadrivecteur covariant
Un ensemble de 4 grandeurs Aµ est appelé
quadrivecteur covariant si pour n'importe quel choix
de vecteurs contravariants Bµ on a :
AµBµ=
invariant ( par changement de coordonnées), c.a.d produit un
scalaire.
On en déduit la relation: A'µ=
(¶Xν/¶X'µ).Aν
Rappelons la dualité entre l’espace vectoriel des
vecteurs contravariants et covariants (si l’un est un espace vectoriel de
référence, l’autre est l’espace vectoriel, dual, des formes linéaires sur ce
premier et vice versa, le dual du dual est l’original).
Tenseur
contravariant ( enfonçons le clou !)
Exemple tenseur
de rang 2 : Notion de tenseur ( produit tensoriel).
On forme les 16 produits Aµν des
composantes Aµ et Bν de 2 quadrivecteurs
contravariants:
Aµν= Aµ * Bν
On appelle cette opération "produit
tensoriel", les 16 composantes ainsi produites sont les composantes du
tenseur Aµν , à noter que le tenseur résultant a ses
composantes µ dans l'espace vectoriel associé au vecteur Aµ et ses
composantes ν dans l'espace vectoriel associé au vecteur Bν
Des propriétés des vecteurs on déduit: Aµν=(¶xµ/¶xλ)(¶xν/¶xρ).Aλρ
Par extension, on appelle tenseur contravariant de
rang 2 tout objet de composantes Aµν qui satisfait la relation
ci dessus
Cette
propriété caractérise un tenseur contravariant
Tenseur covariant
De même, on appelle tenseur covariant d'ordre 2 un
objet de composantes Aµν qui satisfait la relation
Aρλ=(¶xµ/¶x'ρ)(¶xν/¶x'λ)Aµν
Cette propriété caractérise un
tenseur covariant
Un tenseur covariant d'ordre 2 prend un tenseur contravariant d'ordre 2 (
ou 2 vecteurs contravariants) en entrée et produit un scalaire en sortie. Cela
se généralise aux ordres supérieurs
Le produit d’un tenseur contravariant ( ou de n
vecteurs contravariants) par un tenseur
covariant de même rang et dimension produit un scalaire , c’est à dire quelque
chose d’invariant par rapport aux coordonnées.
Tenseur mixte et de rang supérieur à 2
C'est le tenseur de plus général qui possède des
composantes contravariantes et covariantes dont les tenseurs présentés
précédemment ne sont de des cas particuliers.
La loi à laquelle il obéit est évidente (extension et
combinaison des lois précédentes)
Une autre présentation rigoureusement équivalente et
plus "intuitive" est la suivante
Un tenseur Tj,k
, noté de variance (j,k), j fois
contravariant et k fois covariant prend en entrée j vecteurs covariants et k
vecteurs contravariants et génère un nombre.
Ce nombre en sortie est une fonction linéaire
des entrées.
Une autre
manière est de dire qu'il prend en entrée k vecteurs contravariants et produit
en sortie j vecteurs contravariants, ce qui est équivalent car si on rajoute en
entrée les j vecteurs covariants ils "mangent "les j vecteurs
contravariants pour produire un nombre!!
Tenseur d’ordre deux (dimension n)
et matrice (n x n)
Bien qu’il s’agisse d’objet mathématiques de natures
différentes, un tenseur de variance ( 1,1) a les mêmes règles opératoires
qu’une matrice n x n.
Quelques opérations utiles sur les
tenseurs
On peut additionner ( soustraire) des
combinaisons linéaires de deux tenseurs de même variance de même dimension
d’indice. On obtient un tenseur de même variance, dont chaque composante est la
somme ( soustraction) des composantes correspondantes.
On peut multiplier
des tenseurs par un scalaire.Chaque
composante est multipliée par le scalaire)
Multiplier de façon externe deux tenseurs: T µνλ
= Aµν.Bλ par exemple ( on multiplie deux à deux
toutes les composantes du premier par toutes
celles du second)
La variance est la somme des variances.
Contracter les tenseurs ( sommer
indice haut sur indice bas ) Contraction de Rµρνλ
On fait λ=ρ et on somme Rµρνρ
Rµν
Elever /abaisser les indices à l’aide respectivement
du tenseur métrique inverse ou du tenseur métrique.
Rµρνλ.
gρσ = Rµσνλ , à noter que les composantes du tenseur
métrique inverse sont les cofacteurs/déterminant de celles du déterminant du
tenseur métrique d’où gµν.gµν
= 4
Le tenseur métrique ( la vedette)
Ce qui précède nous amène à
introduire ce tenseur fondamental gµν
de variance (0,2) et son inverse gµν de variance (2,0) qui satisfont à : ![]()
C’est en particulier le
variable dynamique utilisée dans les équations de la RG
L'importance du tenseur métrique dans les espaces
courbés est telle qu'un nouveau symbole gmn lui a été attribué (hmnest réservé à
la métrique de Minkowski). Ce tenseur est général, sa seule contrainte étant
qu'il doit être un tenseur (0,2) symétrique. Sauf cas particulier, il est non
dégénéré, ce qui veut dire que son déterminant g = | gmn| n'est pas nul.
|
|
|
La symétrie de gmn implique que son inverse gmn l'est aussi. Comme en relativité restreinte , la
métrique et son inverse peuvent être utilisés pour abaisser ou élever des
index.
La métrique joue un rôle central et déterminant dans
la théorie de la Relativité , citons quelques unes des propriétés et
applications de gmn :
(1) La métrique fournit une notion de passé et de
futur.
(2) La métrique permet le calcul de la longueur des
chemins et du temps propre.
(3) La métrique détermine le chemin le plus court
entre deux points, et par la même, la trajectoire des particules.
(4) La métrique remplace le champ gravitationnel
Newtonien F.
(5) La métrique fournit la notion de référentiel
localement inertiel, en conséquence un critère
d'absence de rotation.
(6) La métrique détermine la causalité, en définissant
les chemins suivis par la lumières comme les plus courts possibles, plus courts
qu'aucun autre chemin suivi par un quelconque autre signal ou des particules
réelles.
(7) La métrique va permette de réaliser les opérations
qui remplacent le produit scalaire de l'espace Euclidien traditionnel de la mécanique Newtonienne, etc..
Ces propositions ne sont pas indépendantes, mais
illustrent l'importance de ce tenseur.
Exemples de tenseurs métriques d’espace temps n = 4
(sous forme diagonale)
Minkowski (dt,dx,dy,dz) -1 1 1 1
Schwarzschild (dt,dr,dθ,dφ) -(1-2GM/r) (1-2GM/r)-1 r² r²sin²θ
Robertson Walker
(dt,dr,dθ,dφ) -1 a²/1-kr² a².r² a²r²sin²θ
Dérivée covariante d'un vecteur, connexion métrique
Si on calcule la dérivée d’un
vecteur par les lois habituelles de dérivation, l’objet qu’on obtient, pourrait
à première vue ressembler à un tenseur à deux indices. Par contre, comme il
n’obéit pas à la loi de transformation des tenseurs, ce n’est pas un tenseur.
Nous sommes amenés à définir une nouvelle dérivée, la dérivée covariante,
obtenue à partir de la dérivée classique, par « ajout » d’un terme
correctif qui se combine linéairement avec le vecteur pour que le résultat soit
un tenseur.
![]()
En RG, Г μνλ,
est le « symbole de Christoffel », qui n’est pas un tenseur, qui
caractérise la « connexion métrique » de l’espace temps courbe, et
s’exprime complètement en fonction de la métrique et de ses dérivées.

Il existe aussi des
connexions non métriques, qui ne sont pas utilisées en RG.
Vous trouverez un exposé
formel d’introduction de la dérivée covariante et de la connexion en : http://www-cosmosaf.iap.fr/MIT-RG3F.htm
Dérivée covariante d'un tenseur
La dérivée classique d’un
tenseur n’étant pas un tenseur, pour conserver ce caractère tensoriel il faut
apporter une succession de termes correctifs (un par élément de variance) et définir par là une dérivée covariante.
La forme générale de la
dérivée d’un tenseur de variance (k,l) est :

En fait pour un vecteur (
tenseur(0,1)) la dérivée covariante corrige la variation intrinsèque propre à
la courbure de la courbe sur laquelle on
opère la dérivation, et rend ainsi
compte uniquement de la variation relative du tenseur par rapport a la courbe.
Transport
parallèle d'un vecteur
Le
transport // d'un vecteur le long d’une courbe s'obtient en déplaçant le
vecteur de façon à conserver l'angle qu'il fait localement avec la courbe (tangente
à la courbe).
On
voit que le résultat dépend du chemin suivi, ce qui explique la difficulté
conceptuelle de comparaison des objets dans un espace courbe.
Tenseurs particulièrement utilisés en Relativité Générale
Tenseur de Riemann
Einstein a cherché comment
construire un tenseur ne contenant que les dérivées premières et secondes des éléments du tenseur métrique pour
construire dans le domaine tensoriel covariant l'équivalent de l'équation de
Poisson. Il est tombé sur le tenseur de Riemann (solution unique ).
Ce tenseur s'établit
indépendamment, de façon théorique en faisant parcourir dans un système de
coordonnées curvilignes un parallélogramme infinitésimal et en comparant les
orientations de départ et d'arrivée d'un vecteur transporté parallèlement sur
la courbe.
![]()
La différence traduit la
courbure et s'exprime par un tenseur assez compliqué: le tenseur de Riemann
mixte du 4éme ordre ( 3 fois covariant et une fois contravariant ) dont les
éléments sont les dérivées premières et secondes des éléments de la métrique.
A noter que cette courbure
est une quantité du deuxième ordre.
ddêi
- ddêi
= êj.Rijkl.dyk.dyl
L'espace
est supposé sans torsion ( le parallélogramme curviligne est fermé ).
Ce tenseur fondamental décrit complètement la Courbure
intrinsèque de l'espace temps au point considéré, mesurable par des
observateurs confinés dans cet l'espace. ( généralisation à N dimensions de la
Courbure de Gauss ). Ne pas confondre avec la courbure extrinsèque que pourrait
avoir l'espace, s'il était plongé dans un espace de dimensions supérieures et
qui serait mesuré par des observateurs vivant dans
cet espace.
Rjikl
= ¶Gijl/¶xk - ¶Gijk/¶xl +Gimk.Gmjl - Giml.Gmjk
Quelque chose de compliqué à calculer, combinaison de différences de dérivées de
Symboles de Christoffel et de différence de produits de ces symboles.
Ce tenseur possède de
nombreuses symétries ( 20 composantes différentes pour 256 possibilités) et
décrit exhaustivement la courbure locale de l'espace.
Si par un choix de coordonnées
, les éléments du tenseur métrique sont localement constants à un point P,
(référentiel chute libre correspondant à un espace tangent de Minkowski), alors
le tenseur de Riemann est localement nul au point P ( la dérivée première du
tenseur métrique=0)
Et s'il est nul dans un référentiel
donné, il l'est dans tous, propriété fondamentale de la RG
En revenant à la définition intuitive des
tenseurs, le tenseur mixte de Riemann, 3 fois covariant et 1 fois contravariant
, va prendre en entrée 3 vecteurs contravariants U,V,W et produire en sortie un
vecteur contravariant W' qui est issu du transport de W le long du
parallélogramme curviligne infinitésimal défini par U,V ,
R(u,v,w)j = Rijkl.Ui,Vk,Wl
Le
tenseur de Riemann possède de nombreuses (anti)symétries. En utilisant la forme
complètement covariante Rmnrs = gdrRmdns
on a :
Rmnrs = Rrsmn, Rmnrs = - Rnmrs = - Rmnsr
= Rnmsr, Rmnrs
+ Rmsnr + Rmrsn = 0
Ce
n’est pas tout : le tenseur de Riemann étant le commutateur de 2 dérivées covariantes, sa dérivée covariante
Di est nulle.
Plus
exactement on obtient l’identité de Bianchi :
Dd
Rmnrs + Ds Rmndr + Dr Rmnsd
= 0
Celle-ci
joue un rôle essentiel dans la théorie de la relativité générale. Par
contraction, elle devient :
Ou on trouve
les tenseurs et scalaire de RICCI
Cette forme suggère directement le
tenseur d’Einstein ( Seul tenseur construit à partir des dérivées premières et
seconde du tenseur métrique et à divergence nulle)
Tenseur de Ricci :
Par contraction de deux
indices on obtient le tenseur covariant d'ordre 2 de Ricci: Rij ( 10 composantes qui permettent de
reconstituer 10 composantes du tenseur de Riemann).Ce
tenseur rend compte au deuxième ordre de la variation de volume dans son
parcours sur les géodésiques.
Mais
où sont passées les 10 autres
composantes ?
Bonne question: D'abord on ne
peut pas annuler complètement le tenseur de Riemann, ce qui voudrait dire que
par un changement de référentiel on compenserait un champ de gravitation (on ne
le fait que très localement).
Par ailleurs le tenseur
Impulsion Energie ne contient pas toutes les informations au sujet de la
courbure , le tenseur de Weyl = Wabcd
contenant le complément lié à la courbure propre de l'espace.
Le tenseur
de Ricci contrôle la dérivée seconde du
changement de volume, d'un petit volume lors de sa trajectoire géodésique.
d²V/dxa,dxb= Ra,b .Va.Vb
Le
tenseur de Weyl contrôle la déformation ( sphère/ellipsoïde)
C'est le tenseur de Ricci qui
figure dans l'équation, car la distribution de matière /énergie ne définit pas
complètement le tenseur de Riemann.
Scalaire de Ricci
On
l'appelle scalaire de courbure
Par
multiplication du tenseur de Ricci par Gij on obtient le scalaire de
Ricci : R
Ce
scalaire qui résulte de contractions multiples du tenseur de Riemann en
synthétise les informations essentielles et est à ce titre très important ( cf principe
de moindre action)
L’équation de la Relativité générale (équation
d’Einstein) en Cosmologie
Rappel : Rmn-1/2(Gmn(R-2L)= - 8pGTmn
Le
tenseur de Ricci et le scalaire de Ricci présents dans le membre de gauche sont
complètement déterminés par le tenseur métrique et ses dérivées premières et
secondes ( via une combinaison des symboles de Christoffel décrivant les connexions métriques,
que l'on peut calculer à partir de la métrique de RW.
êR00 0 0 0 ê |
1 | êT00 0 0 0 ê
ê R11 0 0 ê+ ½(R-2L) . |
-a²/(1-kr²) | = - 8pG. ê0 T11 0 0 ê
ê R22 0 ê | -a²r² | ê0 0 T22 0 ê
ê R33 ê | -a²r²sin²q | ê0 0 0 T33 ê
Rµν
= Tenseur de Ricci gµν=Tenseur
Métrique Tµν= Tenseur Impulsion/E
Tenseur de
Rici: Rij= ¶Gikj/¶xk- GiklGjlk , scalaire de Ricci: R=Gij. Rij Tij=(p+r)Ui.Uj
- p.Gij
et Gikj = 1/2(Glk )( ¶Gjl/¶xi + ¶Gil/¶xj - ¶Gij/¶xl )
On obtient alors les deux (compte
tenu de l'isotropie spatiale en x,y,z) équations
ci dessous
(2/a)(d²a/dt²)+(1/a²)(da/dt)²+Kc²/a²
-L.c²= -8pGp/c² (1)
(3/a²)(da/dt)²+3Kc²/a² - Lc²= 8pGr (2)
Annexe : Equation Géodésique
Méthode 1 ( Géométrique la plus simple)
Partant du fait que la
géodésique est une droite en RR on effectue le changement de coordonnées pour
trouver son équivalent dans un système quelconque. Le résultat ne met pas
directement en évidence que cette équation ne dépend que de la métrique.
Méthode 2 ( Définie par le
vecteur tangent)
 qui implique
qui implique 
Méthode 3 ( Méthode «
physique » originale d’Einstein)
On
écrit que la géodésique est la courbe qui minimise l'intégrale du chemin (ds).
En
fait Einstein utilise sans le dire, le Lagrangien : L(x,dx/dp) = ½(gµν). (dxµ/dp) (dxν/dp) qui est L=
½(ds²/dp²) qui correspond à l’intervalle d’espace temps,
En
appliquant les équations qui expriment la condition d’extremum: d/dp(¶L/¶(dxµ/dp))
= ¶L/¶xµ, On
arrive à: d²xs/ds²+ Gmsn .(dxm/ds)(dxn/ds) = 0
Rappelons
que l'équation du mouvement géodésique)
est contenue dans l'équation du champ.
Exercice : La dérivée covariante
Quels
définitions et calculs pour vous mettre le pied à l’étrier
Dérivée covariante
Nous voudrions définir un
opérateur de dérivée covariante ![]() qui
réaliserait l'opération de dérivée partielle, mais de façon indépendante des
coordonnées.
qui
réaliserait l'opération de dérivée partielle, mais de façon indépendante des
coordonnées.
Propriétés fondamentales
Nous exigerons donc de ![]() qu'il
soit une application linéaire de tenseurs (k,
l ) vers des tenseurs (k, l
+ 1) avec les deux propriétés suivantes:
qu'il
soit une application linéaire de tenseurs (k,
l ) vers des tenseurs (k, l
+ 1) avec les deux propriétés suivantes:
1. linéarité: <!-- MATH
$\nabla(T+S) = \nabla T + \nabla S$
-->![]() (T
+ S) =
(T
+ S) = ![]() T +
T + ![]() S ;
S ;
2.
règle de Leibniz (produit) : ![]() (T ÄS) = (
(T ÄS) = (![]() T) ÄS + T Ä (
T) ÄS + T Ä (![]() S) .
S) .
Si ![]() obéit
à la règle de Leibniz il peut toujours être écrit comme une dérivée partielle
plus une transformation linéaire. Pour prendre la dérivée covariante, nous
commençons par prendre la dérivée partielle et nous appliquons une correction
pour rendre le résultat covariant ( nous n'allons pas en faire la preuve, mais
vous la trouverez dans "Wald" si cela vous intéresse). Considérons le
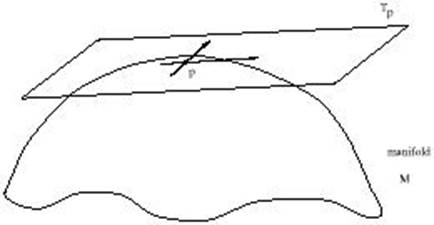
cas d'un vecteur Vn.
Cela signifie que pour chaque direction m, la dérivée covariante Ñm va consister en la dérivée partielle ¶m
plus une correction spécifiée par une matrice
(Gm)rs.
(une matrice n × n , où n est la dimension de la Variété pour
chaque index m).
obéit
à la règle de Leibniz il peut toujours être écrit comme une dérivée partielle
plus une transformation linéaire. Pour prendre la dérivée covariante, nous
commençons par prendre la dérivée partielle et nous appliquons une correction
pour rendre le résultat covariant ( nous n'allons pas en faire la preuve, mais
vous la trouverez dans "Wald" si cela vous intéresse). Considérons le
cas d'un vecteur Vn.
Cela signifie que pour chaque direction m, la dérivée covariante Ñm va consister en la dérivée partielle ¶m
plus une correction spécifiée par une matrice
(Gm)rs.
(une matrice n × n , où n est la dimension de la Variété pour
chaque index m).
Coefficients de connexion
En fait les parenthèses sont généralement omises et nous écrirons ces matrices appelées coefficients de connexion, de la manière suivante Grms. Nous avons donc
|
<TBODY> |
(3.1) </TBODY> |
Remarquons que dans le second membre,
l'index original du vecteur V a été
transféré vers![]() , et le nouvel index ne sert qu'à la sommation. Si c'est bien l'expression de
la dérivée covariante d'un vecteur en termes de dérivée partielle, nous
devrions être capables de déterminer les propriétés de transformation de Gnml,
en exigeant que le membre de gauche soit un tenseur (1,1).
, et le nouvel index ne sert qu'à la sommation. Si c'est bien l'expression de
la dérivée covariante d'un vecteur en termes de dérivée partielle, nous
devrions être capables de déterminer les propriétés de transformation de Gnml,
en exigeant que le membre de gauche soit un tenseur (1,1).
Propriétés des transformations des dérivées covariantes de Vecteurs
Donc, nous voulons que la loi de transformation soit :
|
<TBODY> |
(3.2) </TBODY> |
Commençons par le membre de
gauche, on peut le développer en utilisant (3.1) et ensuite transformer les
parties par les règles que nous connaissons :
|
<TBODY> |
(3.3) </TBODY> |

Le membre de droite
peut être développé de façon similaire :
|
<TBODY> |
(3.4) </TBODY> |
Ces deux expressions doivent être
égalées, le premier terme de chaque est identique et s'annule donc, alors nous
avons :
|
<TBODY> |
(3.5) </TBODY> |
Où nous avons renommé l'index de
sommation ![]() en
en ![]() .
Cette équation doit être vraie pour tout vecteur V l,
donc nous pouvons l'éliminer des deux membres. Ensuite les coefficients de
connexion dans les coordonnées "primées" peuvent être isolées en
multipliant par
.
Cette équation doit être vraie pour tout vecteur V l,
donc nous pouvons l'éliminer des deux membres. Ensuite les coefficients de
connexion dans les coordonnées "primées" peuvent être isolées en
multipliant par ![]() xl/
xl/![]() xl'.
xl'.
Le résultat est :
|
<TBODY> |
(3.6) </TBODY> |
Ce n'est évidemment pas une loi
de transformation de tenseur, à cause du second terme.
Ceci est normal puisque les coefficients de connexion ne sont pas
des tenseurs. Par construction, les ![]() 's
sont non tensoriels puisqu'ils sont destinés à "corriger" et rendre
tensoriels les dérivées partielles qui ne le sont pas, autrement dit annuler le
terme qui détruit le caractère tensoriel (donc qui n'est pas un tenseur!) de
l'expression (3,1). C'est pourquoi il faut être attentif aux placements des
index dans les coefficients de connexion, ils ne sont pas des tenseurs et nous
ne pouvons pas les abaisser ou les élever à l'envi.
's
sont non tensoriels puisqu'ils sont destinés à "corriger" et rendre
tensoriels les dérivées partielles qui ne le sont pas, autrement dit annuler le
terme qui détruit le caractère tensoriel (donc qui n'est pas un tenseur!) de
l'expression (3,1). C'est pourquoi il faut être attentif aux placements des
index dans les coefficients de connexion, ils ne sont pas des tenseurs et nous
ne pouvons pas les abaisser ou les élever à l'envi.
Exercice : ( Difficile) Montrer que la dérivée partielle ¶m d’un vecteur V l, n’est pas un tenseur :
Méthode suggérée :
Appliquer les dérivées partielles dans chacun des systèmes de coordonnées,
utiliser la loi de transformation des vecteurs Vµ ’ = (∂ x’µ /∂
xµ) . Vµ , appliquer
la loi de composition des dérivations partielles d’un système de coordonnées
vers l’autre et remarquer que le résultat n’est pas conforme à la loi de
transformation relative aux tenseurs. Attention aux manipulations
d’indices !