http://pancake.uchicago.edu/~carroll/notes/ : J. Fric endosse toute responsabilité pour les erreurs que sa traduction (qui n’a pas été vérifiée par l’auteur) aurait pu ajouter. En cas de doute, veuillez vous rapporter à la version originale.
5. Compléments géométriquesSommaireIntroduction Rétro projection d’une fonction Relations entre les composantes d’un vecteur avant et après projection Matrice de projection Projection et changement de coordonnées Rétro projection de formes monolinéaires Matrice de rétro projection Objets concernés par les (rétro)projections La rétro projection vue comme une combinaison d’applications Rétro projection de formes multilinéaires Projection d’un tenseur contravariant de rang quelconque Matrice de rétro projection de formes multilinéaires Matrice de projection de tenseurs contravariants de rang quelconque Exemple d’application Difféomorphismes et changement de
coordonnées Le difféomorphisme pour comparer les tenseurs en deux points différents Une nouvelle dérivée se prépare Champs de vecteurs tangents aux courbes de familles de difféomorphisme La dérivée de Lie d’un champ de tenseurs quelconque est covariante Dérivée de Lie de la métrique Application à la relativité générale Conservation de l’énergie impulsion comme conséquence de l’invariance par difféomorphisme Équation de Killing Lois de conservation associées aux vecteurs de Killing |
3 3 3 4 4 4 4 4 5 5 5 6 6 6 6 7 8 8 9 9 9 9 10 10 11 13 13 13 14 15 15 16 16 16 16 |
5. Compléments géométriques
Introduction
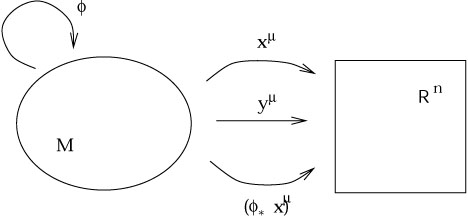
Ayant compris comment les lois de la physique peuvent être adaptées à un espace courbe, il est indéniablement tentant de nous intéresser aux applications. Cependant, quelques compléments géométriques nous sont indispensables pour nous permettre d’aller plus avant. Dans le chapitre 2, nous avons introduit les applications entre variétés avec leurs lois de composition. Nous nous intéressons maintenant à l’utilisation de ces applications pour transporter un champ de tenseurs d’une variété à une autre.
Considérons deux variétés M et N,
éventuellement de dimensions différentes munies respectivement de systèmes de
coordonnées xm et y![]() . Supposons une
application
F: M
. Supposons une
application
F: M ![]() N et une fonction f :
N
N et une fonction f :
N ![]()
![]() .
.
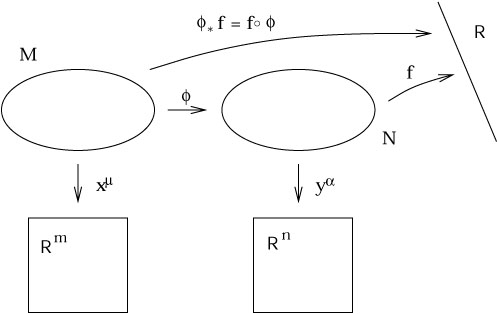
Rétro projection d’une
fonction
Nous
pouvons composer de façon évidente
F avec f pour définir une
application (fo F) :
M ![]()
![]() , qui est simplement une fonction sur M.
Une telle construction est très utilisée et un nom lui a été attribué: Nous
définissons la rétro projection de f par F,
notée F*f, par :
, qui est simplement une fonction sur M.
Une telle construction est très utilisée et un nom lui a été attribué: Nous
définissons la rétro projection de f par F,
notée F*f, par :
|
(5.1) |
Le nom est explicite, car l’opérateur F* transpose en amont la fonction f de N à M.
Nous
pouvons rétro projeter des fonctions, mais nous ne pouvons pas les projeter. Si
nous avons une fonction g : M ![]()
![]() , il n’y a pas de moyen de composer g
avec
F pour créer une fonction sur N,
les flèches ne correspondent pas.
, il n’y a pas de moyen de composer g
avec
F pour créer une fonction sur N,
les flèches ne correspondent pas.
Projection d’un Vecteur
Mais rappelons-nous qu’un vecteur peut être
considéré comme un opérateur de dérivation qui s’applique sur des fonctions
régulières (continues et infiniment dérivables) et produit des nombres
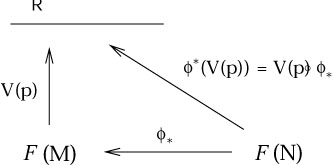
réels. Ceci nous permet de définir la projection d’un vecteur, si V(p)
est un vecteur en un point p sur M, nous définissons le vecteur
projeté F*V
au point F
(p) sur N en définissant son action sur les fonctions de N :
|
(5.2) |
Donc projeter un champ de vecteurs, c’est faire agir F* V sur une fonction quelconque, c’est donc l’action de V sur la rétro projection de la fonction.
Relations entre les
composantes d’un vecteur avant et après projection
C'est un peu abstrait,
et nous allons essayer de concrétiser la description. Nous savons qu’une base
de vecteurs sur M est donnée par l’ensemble des dérivées partielles ¶m=
¶/¶xm,
et une base sur N est donnée par l’ensemble des dérivées partielles ¶a=
¶/¶ya.
Donc nous voulons mettre en relation les composantes de V = Vm¶m avec ceux de (F*V)
= (F*V)![]() . ¶a Nous pouvons trouver la
relation recherchée en appliquant le vecteur projeté à une fonction de test et
en utilisant la règle de chaînage (2.3) :
. ¶a Nous pouvons trouver la
relation recherchée en appliquant le vecteur projeté à une fonction de test et
en utilisant la règle de chaînage (2.3) :
|
(5.3) |

Matrice de projection
Cette
formule simple nous incite à représenter l’opération de projection F* par un opérateur matriciel, (F*V)![]() = (F*)
= (F*)![]() m Vm, la matrice étant définie par :
m Vm, la matrice étant définie par :
|
(5.4) |
Projection et changement de
coordonnées
La
transformation d’un vecteur par projection, ressemble à s’y méprendre à un
changement de coordonnées. C’est en fait une généralisation, et quand M
et N sont en fait la même variété c’est identique, mais ne nous y
trompons pas, en général m et ![]() ont des valeurs permises différentes
et il n’y a aucune raison pour que la matrice
ont des valeurs permises différentes
et il n’y a aucune raison pour que la matrice ![]() y
y![]() /
/![]() xm soit inversible. C’est un exercice
instructif de vérifier qu’alors que nous pouvons projeter des vecteurs de
M vers N (par une application
F: M
xm soit inversible. C’est un exercice
instructif de vérifier qu’alors que nous pouvons projeter des vecteurs de
M vers N (par une application
F: M ![]() N), nous ne pouvons pas en
général les rétroprojeter, essayez d’imaginer un procédé pour cela, alors la
vanité de l’entreprise vous apparaîtra dans sa plénitude.
N), nous ne pouvons pas en
général les rétroprojeter, essayez d’imaginer un procédé pour cela, alors la
vanité de l’entreprise vous apparaîtra dans sa plénitude.
Rétro projection de formes
monolinéaires
Comme
les formes monolinéaires sont les duaux des vecteurs, cela ne vous surprendra
pas d’apprendre que les formes monolinéaires peuvent être rétro projetées mais
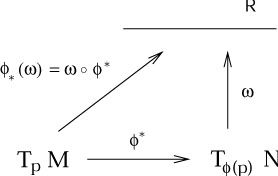
en général pas projetées. Pour le montrer, rappelons-nous que les formes
monolinéaires sont des applications de vecteurs vers des nombres réels. La rétro
projection F*w d’une forme monolinéaire
![]() sur N peut
être définie par son action sur un vecteur V sur M, en l’égalant
avec l’action de
sur N peut
être définie par son action sur un vecteur V sur M, en l’égalant
avec l’action de ![]() lui-même sur la projection de V :
lui-même sur la projection de V :
|
(5.5) |
Rappelons que c’est simple description matricielle de l’opérateur de rétro projection sur les formes (F*)m= (F*)mawa, que nous pouvons établir en utilisant la règle de chaînage.
Matrice de rétro projection
Elle est donnée par :
|
(5.6) |
C'est la même matrice que pour la projection (5.4), mais bien sur, c’est un index différent qui est concerné quand on l’applique pour rétro projeter les formes monolinéaires.
Objets
concernés par les (rétro)projections
Il
est facile de comprendre pourquoi les rétroprojections et les projections
s’appliquent sur certains objets et pas d’autres, par l’argument suivant. Si
nous appelons![]() (M)
l’ensemble des fonctions régulières (continues, dérivables) sur M,
alors un vecteur V(p) en un point p de M
(élément de l’espace tangent TpM) peut être représenté
comme un opérateur de
(M)
l’ensemble des fonctions régulières (continues, dérivables) sur M,
alors un vecteur V(p) en un point p de M
(élément de l’espace tangent TpM) peut être représenté
comme un opérateur de ![]() (M) vers
(M) vers
![]() . Mais nous savons que
l’opérateur de rétro projection sur les fonctions applique
. Mais nous savons que
l’opérateur de rétro projection sur les fonctions applique
![]() (N) sur
(N) sur
![]() (M) (comme F
lui-même applique M sur N, mais dans l’autre sens). Donc nous pouvons
définir la projection F*
opérant sur les vecteurs comme résultant d’une composition des applications,
comme nous avions défini initialement la rétro projection des fonctions.
(M) (comme F
lui-même applique M sur N, mais dans l’autre sens). Donc nous pouvons
définir la projection F*
opérant sur les vecteurs comme résultant d’une composition des applications,
comme nous avions défini initialement la rétro projection des fonctions.
|
|
De
même, si TqN est l’espace tangent à un point q
sur N, Alors une forme monolinéaire
![]() en q
(élément de l’espace cotangent Tq*N) peut
être représenté par un opérateur de TqN vers
en q
(élément de l’espace cotangent Tq*N) peut
être représenté par un opérateur de TqN vers
![]() .
.
La rétro projection vue comme
une combinaison d’applications
Comme la projection F* applique TpM sur TF (p)N, la rétro projection F* d’une forme monolinéaire peut être interprétée comme une simple composition d’applications.
Si cela ne vous aide pas, ne somatisez pas, mais gardez en mémoire ce qui existe et ce qui n’existe pas, les concepts sont simples, c’est juste la mémorisation de ce que font les applications qui prête à confusion, tant tout ceci se ressemble.
Rétro projection de formes
multilinéaires
Rappelons qu’un tenseur
(0, l) avec l indices et pas d’exposant est une forme
multilinéaire appliquant l vecteurs sur
![]() . Nous pouvons donc
rétro projeter non seulement des formes linéaires mais des tenseurs munis d’un nombre
quelconque d’indices. La définition est simplement l’action du tenseur
original sur les vecteurs projetés.
. Nous pouvons donc
rétro projeter non seulement des formes linéaires mais des tenseurs munis d’un nombre
quelconque d’indices. La définition est simplement l’action du tenseur
original sur les vecteurs projetés.
|
(5.7) |
où Ta1 ... al est un tenseur (0, l) sur N.
Projection d’un tenseur
contravariant de rang quelconque
De même nous pouvons projeter un tenseur de type
(k, 0), Sm1 ... mk quelconque en l’appliquant sur les
formes linéaires rétro projetées :
|
(5.8) |
Matrice de rétro projection
de formes multilinéaires
Heureusement, les matrices représentant la
projection (5.4) et la rétro projection (5.6) peuvent se généraliser à
des tenseurs de rang plus élevé simplement en associant une matrice à chaque
index, alors pour la rétro projection d’un tenseur (0, l), nous
avons :
|
(5.9) |
Matrice de projection de
tenseurs contravariants de rang quelconque
Tandis que pour la projection d’un tenseur (k,
0) nous avons :
|
(5.10) |
Le diagramme complet est alors :
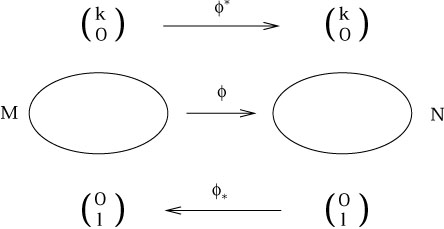
Remarquons que les tenseurs mixtes ne peuvent généralement ni être projetés, ni être rétro projetés.
Exemple d’application
Ce mécanisme devient moins impressionnant, quand on le met en œuvre sur un exemple simple. Un cas biblique d’application entre deux variétés, quand l’une M est un sous ensemble de l’autre N, consiste a faire correspondre à un élément de M le même élément dans N.
Considérons une sphère S² incluse dans R3,
comme lieu des points à une distance unitaire d’un point appelé centre.
Choisissons les coordonnées xm = (![]() ,F) sur M = S2
et y
,F) sur M = S2
et y![]() = (x, y, z)
sur N = R3, l’application
F: M
= (x, y, z)
sur N = R3, l’application
F: M ![]() N est donnée par :
N est donnée par :
|
(5.11) |
Précédemment nous
avons considéré la métrique ds2 = dx2 + dy2
+ dz2 sur R3, , et indiqué qu’elle induit une métrique dq²
+ sin2![]() dF²
sur S2, en reportant simplement (5.11) dans cette métrique
Euclidienne sur R3. Nous n’avions pas justifié cette assertion en
ces temps-là, mais maintenant nous allons le faire. (Ce serait plus naturel, si
nous travaillions en coordonnées sphériques sur R3, mais ici, la difficulté est riche
d’enseignement). La matrice des dérivées partielles est donnée par :
dF²
sur S2, en reportant simplement (5.11) dans cette métrique
Euclidienne sur R3. Nous n’avions pas justifié cette assertion en
ces temps-là, mais maintenant nous allons le faire. (Ce serait plus naturel, si
nous travaillions en coordonnées sphériques sur R3, mais ici, la difficulté est riche
d’enseignement). La matrice des dérivées partielles est donnée par :
|
(5.12) |

La métrique sur S2 est
obtenue simplement en y rétro projetant la métrique de R3
|
(5.13) |

Résultat que vous
pouvez vérifier. Certes le résultat est le même que si nous avions opéré une
banale substitution, mais nous savons pourquoi. Nous avons manifesté la plus
grande prudence quant à l’utilisation d’une application F: M ![]() N pour projeter ou rétro
projeter certains objets et pas d’autres. La raison de non réversibilité vient
de ce que F
peut ne pas être inversible.
N pour projeter ou rétro
projeter certains objets et pas d’autres. La raison de non réversibilité vient
de ce que F
peut ne pas être inversible.
Difféomorphismes
Si F est inversible et que et F et F-1 sont régulières, ce que nous supposons toujours implicitement, alors cela définit un difféomorphisme entre M et N. Dans ce cas M et N représentent une même variété abstraite. La beauté des difféomorphismes est que nous pouvons utiliser et F et F-1 pour porter des tenseurs de M vers N.
Ceci nous permet de définir les
(rétro)projections de tenseurs quelconques. En particulier pour un champ de
tenseurs (k, l) Tm1 ... mkn1... nl sur M, nous définirons
la projection par :
|
(5.14) |
où les w (i) sont les formes monolinéaires sur N et les V(i)
sont les vecteurs sur N. Pour les composantes cela donne :
|
(5.15) |

L’apparition
de la matrice inverse ![]() xn/
xn/![]() yb est légitime car
F est inversible. Nous pourrions aussi
définir la rétro projection de manière évidente, mais il est inutile d’écrire
des équations différentes puisque le rétro projection F* est la même que la projection via
l’application inverse [F-1 ]*.
yb est légitime car
F est inversible. Nous pourrions aussi
définir la rétro projection de manière évidente, mais il est inutile d’écrire
des équations différentes puisque le rétro projection F* est la même que la projection via
l’application inverse [F-1 ]*.
Difféomorphismes
et changement de coordonnées
Nous sommes maintenant prêt
pour expliquer la différence entre les difféomorphismes et les transformations
de coordonnées. C’est en fait deux manières de parvenir au même résultat. Les
difféomorphismes étant des “transformations de coordonnées actives” alors que
les transformations de coordonnées classiques sont “passives”. Considérons urne
variété M de dimension n avec des fonctions de coordonnées xm : M ![]() Rn. Pour changer de coordonnées, nous
pouvons soit simplement introduire de nouvelles fonctions ym : M
Rn. Pour changer de coordonnées, nous
pouvons soit simplement introduire de nouvelles fonctions ym : M ![]() Rn (" On garde la variété fixe
et on change l’application de coordonnées"), où nous pouvons tout aussi
bien définir un difféomorphisme F:
M
Rn (" On garde la variété fixe
et on change l’application de coordonnées"), où nous pouvons tout aussi
bien définir un difféomorphisme F:
M ![]() M, dont les coordonnées seront
les rétroprojections (F*x)m : M
M, dont les coordonnées seront
les rétroprojections (F*x)m : M ![]() Rn ("projeter les points sur la
variété et en évaluer les nouvelles coordonnées "). En ce sens, (5.15) est
réellement une transformation tensorielle, juste représentée d’une autre
manière.
Rn ("projeter les points sur la
variété et en évaluer les nouvelles coordonnées "). En ce sens, (5.15) est
réellement une transformation tensorielle, juste représentée d’une autre
manière.
|
|
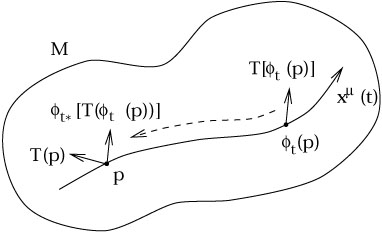
Le difféomorphisme pour
comparer les tenseurs en deux points différents
Comme un difféomorphisme
nous permet de (rétro)projeter des tenseurs quelconques, il permet de comparer
d’une autre manière des tenseurs en différents points de la variété. Soit un
difféomorphisme F : M ![]() M et un champ de tenseurs Tm1 ... mkn1... nl (x), nous pouvons évaluer la
différence entre la valeur du tenseur en un point p et sa valeur en F
(p) rétro projetée en p : F*
[Tm1 ... mkn1... nl (
F (p))].
M et un champ de tenseurs Tm1 ... mkn1... nl (x), nous pouvons évaluer la
différence entre la valeur du tenseur en un point p et sa valeur en F
(p) rétro projetée en p : F*
[Tm1 ... mkn1... nl (
F (p))].
Une nouvelle dérivée se
prépare
Ceci suggère que nous pouvons définir un autre type de dérivée sur les champs de tenseurs, qui caractériserait le taux de variation du tenseur lorsque transporté par un difféomorphisme.
Famille de difféomorphismes
Pour cela pourtant un difféomorphisme discret unique
est insuffisant, nous nécessitons une famille mono paramétrée de
difféomorphismes, Ft.
Cette famille peut être interprétée comme une application régulière de
![]() x M
x M ![]() M, telle que pour chaque t Î
M, telle que pour chaque t Î![]() , Ft est un difféomorphisme et (Fs)o(Ft) = Fs+t.
Remarquons que cette dernière condition implique que F0 est l’élément neutre.
, Ft est un difféomorphisme et (Fs)o(Ft) = Fs+t.
Remarquons que cette dernière condition implique que F0 est l’élément neutre.
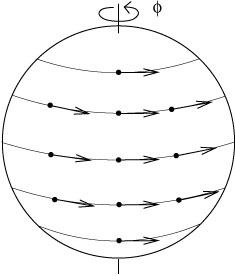
Les familles de difféomorphismes mono paramétrées peuvent être interprétée comme issues de champs de vecteurs et vice versa. Si on considère l’action de la famille entière Ft sur le point p, il est clair que cela peut être représenté par une courbe dans M, et comme cela est indépendant du point, appliqué à tous les points, toutes ces courbes vont remplir la variété (à l’exception de singularités éventuelles ou l’image peut être un point).
Champs de vecteurs tangents
aux courbes de familles de difféomorphisme
Nous pouvons définir un champ de vecteurs Vm (x) comme l’ensemble des vecteurs tangents à chacune de ces courbes chaque point évalué à t = 0.
Un
exemple sur S2 est donné par le difféomorphisme Ft(![]() ,F)
= (
,F)
= (![]() ,F+
t).
,F+
t).
|
|
Nous pouvons inverser la construction et définir une famille mono paramétrée de
difféomorphismes depuis n’importe quel champ de vecteurs.
Courbes intégrales
Soit un champ de vecteurs Vm (x), nous définissons les courbes
intégrales du champ de vecteurs comme étant les courbes qui satisfont à
l’équation :
|
(5.16) |
Remarquons que cette équation familière est ici à utiliser à l’envers, car le champ de vecteurs est donné, et cette équation définit une courbe à lui associer. Les solutions de (5.16) existent sous réserve de se comporter régulièrement et de ne pas “percuter” les limites de la variété, vous en trouverez la démonstration, qui consiste à trouver le système de coordonnées approprié dans lequel le problème se ramène au théorème fondamental des équations différentielles classiques, dans les manuels de géométrie différentielles.
Générateur de
difféomorphismes
Nos difféomorphismes Ft représentent " le flux sur les courbes intégrales" et le champ de vecteurs est appelé le générateur du difféomorphisme (ces courbes intégrales sont largement utilisées en physique, mais pas sous ce nom). Les lignes de flux magnétique matérialisées par de la limaille de fer entre les pôles d’un aimant, sont simplement les courbes intégrales du champ magnétique de vecteurs B.
Etant donné un champ de vecteurs Vm (x), alors nous avons une famille de difféomorphismes paramétrées par t, et il est naturel d’évaluer les paramètres de la variation d’un tenseur lorsqu’il est déplacé le long d’une courbe intégrale. Pour chaque t nous pouvons définir cette variation par :
|
(5.17) |
Remarquons que les deux termes du membre de
droite sont des tenseurs en p.
|
|
Dérivée de Lie
Nous définirons donc la dérivée de Lie du tenseur le long du champ de vecteurs par :
|
(5.18) |

La dérivée de Lie est une application d’un champ
de tenseurs (k, l) sur un champ de tenseurs (k, l)
qui est manifestement indépendant des coordonnées. De par sa définition,
dérivée classique des fonctions des composantes d’un tenseur, cette dérivée est
manifestement linéaire.
|
(5.19) |
Et obéit à la règle de Leibniz,
|
(5.20) |
Où S et T sont des tenseurs et a et b des constantes. La dérivée de Lie, est en fait une notion plus primitive que celle de la dérivée covariante, car elle ne requiert aucune spécification de connexion (bien qu’elle requière un champ de vecteurs tout de même).
Il est facile de voir qu’elle se ramène à une
dérivée classique sur les fonctions.
|
(5.21) |
Pour discuter de l’action de la dérivée de Lie sur les tenseurs en des termes que nous connaissons, nous devons choisir un système de coordonnées adapté à notre problème. Nous allons travailler en coordonnées xm où x1 est le paramètre le long de la courbe intégrale (les autres coordonnées peuvent être choisies arbitrairement).
Alors le champ de vecteurs prend la forme V
= ![]() /
/![]() x1;
ce qui donne les composantes Vm = (1, 0, 0,..., 0). Le côté magique
de ce système de coordonnées est qu’un difféomorphisme par t produit une
transformation de coordonnées de xm vers ym = (x1 + t, x2,...,
xn).
x1;
ce qui donne les composantes Vm = (1, 0, 0,..., 0). Le côté magique
de ce système de coordonnées est qu’un difféomorphisme par t produit une
transformation de coordonnées de xm vers ym = (x1 + t, x2,...,
xn).
Donc d’après (5.6) la matrice de rétro projection
est simplement :
|
(5.22) |
Et les composantes du tenseur rétro projeté de F (p) à p sont simplement :
|
(5.23) |
Dans ce système de coordonnées la dérivée de Lie devient
|
(5.24) |
Et en particulier la dérivée du champ de vecteurs Um (x) est :
|
(5.25) |
Bien que cette expression ne soit manifestement pas covariante, nous savons que le commutateur [V, U] est un tenseur bien défini, et dans ce système de coordonnées :
|
(5.26) |

Donc la dérivée de Lie de U respectivement à V, a les mêmes composantes dans ce système de coordonnées que le commutateur de V et U, et comme ce sont deux vecteurs, ceci doit être vrai dans n’importe quel système de coordonnées :
|
(5.27) |
Comme conséquence immédiate nous avons £VS = - £WV. C’est à cause de (5.27) que le commutateur est quelquefois appelé “les crochets de Lie” Cherchons maintenant comment £V agit sur une forme monolinéaire wm. Commençons par son action sur le scalaire wmUm pour un champ quelconque de vecteurs Um. Utilisons d’abord le fait que la dérivée de Lie respectivement à un champ de vecteurs se réduit à l’action du vecteur lui-même quand elle est appliquée sur un scalaire :
|
(5.28) |

Utilisons la règle de Leibniz sur le scalaire original :
|
(5.29) |

Égalons ces deux expressions et comme elles doivent être vraies pour Um quelconque, nous voyons que :
|
(5.30) |
Ce qui (conformément à la définition d’un commutateur) est complètement covariant, même si cela ne saute pas aux yeux
La dérivée de Lie d’un champ de
tenseurs quelconque est covariante
Par une procédure semblable, nous pouvons définir la dérivée de Lie d’un champ de tenseurs quelconque. Le résultat peut s’écrire :
|
(5.31) |

En dépit des apparences, cette expression est covariante. Il serait pourtant rassurant d’avoir une autre formulation de cette expression où cette covariance serait manifeste. Il apparaît que nous pouvons écrire :
|
(5.32) |

Où Ñm représente une dérivée covariante symétrique (sans torsion) quelconque, incluant bien sûr celle dérivant de la métrique. Si nous développions (5.32), nous pourrions vérifier que tous les termes impliquant les coefficients de connexion s’annulent ne laissant que (5.31). Les deux versions de la dérivée de Lie sont utiles en différentes occasions.
Dérivée de Lie de la métrique
La dérivée de Lie de la métrique se révèle être d’une importance particulière :
|
(5.33) |

où Ñm
est la dérivée covariante déduite de gmn