Une Introduction, pas trop débile, à la Relativité
Générale
6- Solution de Schwarzschild et trous noirs
Sean M. Carroll
Enrico Fermi Institute
and department of Physics
Carroll@theory.uchicago.edu
2001
( Traduction
Jacques Fric Juin 2002)
La
Relativité générale (RG) est la plus belle théorie jamais inventée. Cependant, elle
a la réputation (justifiée) d'être extrêmement difficile à comprendre,
principalement pour deux raisons: Il y a des tenseurs partout et l'espace temps
de référence est courbe. Ces deux points obligent les utilisateurs de la
RELATIVITÉ GÉNÉRALE à utiliser un langage particulier qui nuit à sa
compréhension par les non initiés. Pourtant il est possible (et c'est ce que ce
document vous propose de faire) de saisir les concepts de base de la théorie,
même si vous n'êtes pas Einstein (et qui l'est ?).
La
Relativité générale peut se résumer à deux propositions:
a-
L'espace temps est une Variété courbe pseudo Riemannienne munie d'une métrique
de signature ( - + + + ). (A noter que sur ce point on trouve aussi la convention équivalente
inverse (+ - - -), mais on préfère de plus en plus la première qui n'a qu'un seul signe -).
b-
La relation entre la matière (énergie) et la courbure de l'espace temps est
décrite par l'équation (d'Einstein):
Rmn - 1/2 . R.gmn = 8p G.Tmn (1)
Naturellement
ces deux propositions sont totalement incompréhensibles à celui qui ne maîtrise
pas le jargon. C'est par là que nous allons commencer.
Vous
remarquerez, que cette introduction très pragmatique, a l'ambition de vous
donner les bases du langage de la
RELATIVITÉ GÉNÉRALE, pour vous faire comprendre au moins de quoi on parle, ( il faut commencer par là) et de vous présenter quelques
points saillants de la théorie dans l'espoir de piquer votre curiosité afin de
vous encourager à une lecture plus approfondie. Il ne se substitue en aucun cas
à cette étude plus approfondie nécessaire si vous voulez comprendre les
fondements de la théorie, ce qui, il faut le reconnaître représente un travail
très conséquent et un bon niveau mathématique. Certains aspects de la
Relativité Générale dans ce document sont introduits
"ex abrupto" ou de façon intuitive, vous en trouverez en général la
démonstration rigoureuse dans le cours détaillé du même auteur " Lectures
notes on general relativity"
Une remarque: Les physiciens adorent
poser les constantes égales à l'unité. Nous ne poserons pas la constante de
Newton G =1, mais nous le ferons pour c ( c=1 implique
que si l'unité de temps est la seconde, l'unité de longueur est la distance
parcourue par la lumière en une seconde) Si c'est utile nous la réintroduirons
facilement en cohérence avec l'équation aux dimensions: exemple si on a E = m, bien entendu c'est E = mc²) .
Comme ouvrages de référence sur la
GR nous recommandons " A first course in general relativity " par Bernard Schutz, de niveau très
accessible et pour ceux qui ont une formation scientifique supérieure "General Relativity " par
Wald, "Gravitation and Cosmology"
par Weinberg, "Gravitation" par Misner, Thorne et Wheeler et "Introducing
Einstein's Relativity" par D'Inverno.
Bien sûr le mieux est de se connecter au
site <http://pancake.uchicago.edu/~carroll/notes>, où vous trouverez les
nouvelles fraîches sur le sujet, cette introduction ayant pour but de vous vous
permettre d'en tirer profit.
La
Relativité Restreinte ( RR) s'appuie sur la constance
de la vitesse de la lumière dans les
référentiels inertiels. Ceci aboutit à une conception où l'espace et le
temps sont liés
pour former l'espace temps, le facteur de conversion entre les unités de temps
et d'espace est c, (c=1 rappelez vous). Les coordonnées d'espace temps peuvent
être choisies comme suit :
x0 = ct = t
x1 = x
x2 = y
x3 = z (2)
Ce
sont des Coordonnées cartésiennes. Juste une remarque de notation, les index hauts
ne sont pas des exposants, ce ne sont que des indices. Ils vont de 0 à 3,
l'ensemble des quatre coordonnées est dénoté xµ.
Quelques
conventions: les indices grecs représentent les coordonnées d'espace temps, occasionnellement
nous utiliserons des indices latins qui ne représentent que les composantes
spatiales: i
=1,2,3.
La
scène sur laquelle la RELATIVITÉ RESTREINTE se joue est une Variété
particulière à quatre dimensions appelée l'espace temps de Minkowski ( quelquefois Espace de Minkowski). Les xµ sont
les coordonnées dans cette Variété. Les éléments de cet espace temps sont les
évènements, un événement est spécifié par ses coordonnées d'espace et de temps.
Les vecteurs dans l'espace temps sont attachés à un événement (pas de vecteurs
libres qu'on pourrait déplacer ad libidum). Comme l'espace temps a quatre
dimensions, ils sont souvent appelés quadri vecteurs et notés Vµ ou
plus simplement V.
Nous
avons aussi une métrique dans l'espace de Minkowski, hmn.
La métrique nous donne un moyen de définir la norme d'un vecteur, ou le produit
scalaire de deux vecteurs. Ecrite sous forme matricielle la métrique de
Minkowski est
ê -1
0 0 0 ê
ê
0 1 0 0 ê
hmn = ê 0 0 1 0 ê (3)
ê
0 0 0 1 ê
Alors
le produit scalaire de deux vecteurs est défini par
A.B =
hmnAmBn = - A0B0 + A1B1
+A2B2 + A3B3 (4)
(Nous
utilisons toujours la convention de sommation dans laquelle les indices hauts
et bas identiques sont sommées sur
toutes les valeurs possibles).
Ce
produit scalaire permet de définir la distance infinitésimale ( au carré) entre
deux points, appelée intervalle d'espace temps:
ds² = hmn dxmdxn (5)
= - dt² + dx² + dy² + dz² (6)
En
fait une équation de la forme (6) est souvent appelée la métrique. La Métrique
contient toute l'information sur la géométrie de la Variété. La métrique de
Minkowski est, bien sûr, juste la généralisation à l'espace temps du produit
scalaire ordinaire sur un espace Euclidien plat (où on a pris l'habitude d'oublier
le terme correspondant au tenseur métrique Euclidien du fait qu'il est unitaire
et que nous pouvons représenter par le symbole de Kronecker dij.). Nous disons que la métrique de Minkowski a une
signature ( - + + + ), quelquefois appelée "Lorentzienne " par
opposition à la signature de la métrique Euclidienne qui ne comporte que des
signes +. (Rappel: on trouve aussi la
convention inverse + - - - ).
Notons
que pour une particule de coordonnées spatiales xi fixes, l'intervalle écoulé quand le temps passe est
négatif, ds² = - dt²
<0. Ceci nous conduit à définir le temps propre t via
dt² = - ds² (7)
Le
temps propre écoulé sur d'une trajectoire de l'espace temps est le temps
effectivement mesuré par l'observateur qui suit
cette trajectoire. D'autres observateurs mesureront des temps
différents.
Un
peu de vocabulaire : Un vecteur Vµ
de norme négative, V.V < 0 est
dit de type temps, si la norme est nulle de type nul (ou encore lumière) et
s'il est positif de type espace. De ce fait les trajectoires de ds² négatif
(pas le temps propre) sont dites de type temps etc..
Ces concepts nous amènent naturellement
au concept de diagramme d'espace temps, que vous connaissez sans doute.
L'ensemble des trajectoires nulles issues et aboutissant à un événement constituent ![]()
![]()
![]()
![]()
![]()

![]()



 le cône de lumière, ce qui est explicité sur la figure
qui suit.
le cône de lumière, ce qui est explicité sur la figure
qui suit.
![]()
![]()
![]()
Fig 1: Le cône de
lumière représenté sur un diagramme d'espace temps. Les points dont l'intervalle
d'espace temps est de type temps par rapport à l'origine sont à l'intérieur du
cône, ceux de type nul sur la surface et ceux de type espace à l'extérieur.
Un
chemin dans l'espace est spécifié par les quatre coordonnées d'espace temps
fonction d'un paramètre, xµ (l ). Un chemin est caractérisé de type temps, nul ou espace selon que son
vecteur tangent dxµ /dl est de type temps, nul ou espace. Pour les chemins de
type temps, le paramètre le plus approprié est le temps propre, que nous
pouvons calculer le long d'un chemin de type temps arbitraire via
t = ò (- ds²)1/2 =
ò [- hmn (dxm/dl)( dxn/dl) ] 1/2 .dl (8)
Le
vecteur Uµ = dxµ /dt est appelé le vecteur quadri-vitesse et est
automatiquement normalisé
hmn UmUn = -1 (9)
comme il
est facile de la vérifier.
Un
autre vecteur associé important est le vecteur quadri impulsion, défini par
pµ = m.U µ (10)
où m est la
masse de la particule. Cette masse est une quantité constante indépendante du référentiel, que l'on peut
interpréter comme la masse au repos. L'énergie d'une particule est alors
simplement p0, la
composante de type temps du vecteur quadri impulsion. Dans le référentiel repos
nous avons p0 = m , comme nous avons posé c = 1 , nous retrouvons la fameuse
équation E = mc².
Dans un référentiel en mouvement nous pouvons trouver les composantes de pµ. en
effectuant une transformation de Lorentz, pour une particule animée d'une tri vitesse v = dx/dt le
long de l'axe des x nous avons
pµ = ( gm,vgm, 0,0) (11)
où g = (1-v²)-1/2 (rappel c =1) . Pour v petit ,
ceci donne p0= m + (1/2)mv², que nous interprétons comme l'énergie au repos
plus l'énergie cinétique) et p1=
mv ( que nous interprétons comme l'Impulsion
Newtonienne).
La
transition d'un espace plat à un espace courbe signifie qu'il ne sera
éventuellement plus possible d'utiliser les coordonnées Cartésiennes. En fait
un système de coordonnées passablement plus compliqué va se révéler nécessaire.
Pour notre propre intérêt , nous voulons de plus que
nos équations restent invariantes par tout changement de ces coordonnées
(covariance générale). Si une équation est valable dans un système de
coordonnées elle doit donc l'être dans
tous. Il apparaît que beaucoup de paramètres que nous allons manipuler en
RELATIVITÉ GÉNÉRALE vont être représentés par des tenseurs. On peut se
représenter les tenseurs comme des vecteurs qu'on peut munir d'un plus grand
nombre d'indices, dont la propriété
caractéristique est de se transformer par changement de
coordonnées xµ ® xµ' suivant la règle
suivante, appelée loi de transformation des tenseurs: [ donnée sur un
exemple de tenseur de rang 3, deux fois covariant (indices bas) et une fois contravariant (indice haut), les indices primés
correspondant aux composantes dans le nouveau système de coordonnées xµ'] ,
Sm'n'r' = (¶xm'/¶xm)(¶xn/¶xn')(¶xr/¶xr') Smnr (12)
Remarquons
que les indices non primés dans le membre de droite sont des indices
opératoires, qui sont sommés sur toutes leurs valeurs possibles et ainsi
disparaissent ne laissant que les indices primés du membre de gauche. La forme
(12) est assez facile à mémoriser, si on pense à la "conservation des
indices": Les indices hauts et bas libres ( non
opératoires, donc primés dans notre exemple) doivent être les mêmes des deux
côtés de l'équation. Cette règle est valable pour n'importe quelle équation tensorielle , pas seulement pour la loi de transformation (
règle syntaxique). Rappelez vous qu'un indice haut ne peut être sommé qu'avec
un indice bas de même nom opératoire ( et vice versa). Comme il n'y a aucun
système de coordonnée préférentiel en RELATIVITÉ GÉNÉRALE, cela nous incite à
établir nos équations sous forme tensorielle, car si une équation entre
tenseurs est valable dans un système de coordonnées ,
elle le sera dans tous.
Les
tenseurs ne sont pas aussi compliqués que ce qu'on pense généralement. Ce ne
sont que des objets géométriques qui sont la généralisation du concept de
vecteur bien connu. Remarquons que les scalaires sont des tenseurs de rang 0 ( pas d'indices), les vecteurs sont des tenseurs avec un indice haut (contravariant) un tenseur avec deux indices en particulier
un haut et un bas peut être représenté par une matrice, bien sûr les tenseurs
peuvent comporter autant d'indices que l'on veut.
Cependant,
il y a tout un vocabulaire que vous devez acquérir. Si un tenseur a n indices hauts et m indices bas, on l'appelle un tenseur de type ou de rang (n,m). Les
indices hauts sont appelés indices contravariants
(Formellement, un indice contravariant se réfère à un
espace vectoriel, dans lequel sont définies les composantes
"ordinaires" d'un vecteur "ordinaire", comme ceux que vous
connaissez bien, à trois dimensions par exemple, dans une base quelconque), et
les indices bas sont appelés covariants
(relatifs à l'espace vectoriel dual des formes linéaires appliquées sur
l'espace vectoriel associé à un vecteur ordinaire correspondant). Cela est un
peu formel, mais pas très compliqué. D'ordinaire on se réfère à cela en parlant
simplement d'indices hauts et d'indices
bas, ce qui compte tenu des règles syntaxiques de manipulation des indices
est plus pratique.
Des
tenseurs de type ( n,m) peuvent être contractés pour former un tenseur de
type ( n-1, m-1) en sommant un de ses indices haut sur un de ses indices bas.
Sm = T mll (13)
La
contraction d'un tenseur à deux indices est souvent appelée la trace (qui est un scalaire, ce qui se
justifie si on y pense un peu).
Si
un tenseur est invariant par permutation d'indices
S ..lµ … = S .. µl … (14)
Alors
il est dit symétrique vis à vis de
ces deux indices, si sa valeur change de signe
S ..lµ … = - S .. µl … (15)
Alors
il est dit antisymétrique. Un
tenseur peut posséder ces propriétés sur un nombre quelconque de ses indices.
Il
est possible de symétriser (antisymétriser) un
tenseur quelconque, en effectuant les combinaisons linéaires appropriées. Cette
procédure de symétrisation, antisymétrisation est notée en encadrant les
indices concernés entre parenthèses ou entre crochets.
T (µ1µ2..µn) = (1/n!)(T µ1µ2..µn
+ somme sur les permutations des indices µ1..µn
)
T [µ1µ2..µn] = (1/n!)(T µ1µ2..µn
+ somme alternée sur les permutations des indices µ1..µn)
(16)
Par
somme alternée, nous entendons que les permutations qui sont le résultat d'un
nombre impair de permutations sont affectées du signe moins alors :
T [µnr] s = 1/6 ( T µnr s - T µrn s + T rµn s - T nµr s + T nrµ s -T rnµ s) (17)
Le
tenseur le plus important en RELATIVITÉ GÉNÉRALE est le tenseur métrique gµn, une
généralisation ( à des coordonnées et une géométrie
arbitraires ) de la métrique de Minkowski hµn. Bien que hµn soit juste un cas
particulier de gµn, nous le notons par un symbole différent pour souligner l'importance
du passage d'un espace plat à un espace courbe. Le tenseur gµn est un tenseur symétrique à deux indices. Un point
important est qu'il est toujours possible de trouver un système de coordonnées
tel qu'en un point spécifié p, les
composantes de la métrique sont celles de la métrique de Minkowski (3) et que
les dérivées premières de cette métrique s'annulent. Autrement dit, la métrique
paraît plate précisément en ce point. Par contre, en général on ne peut pas
annuler les dérivées secondes de gµn, en raison précisément de la courbure locale de
l'espace temps.
Même
si l'espace temps est plat , la métrique peut avoir
des dérivées qui ne s'annulent pas si le système de coordonnées n'est pas
Cartésien. Par exemple en coordonnées sphériques ( espace)
nous avons
t = t
x = r sinq cos j
y = r sinq sin j
z = r cosq (18)
Ce
qui conduit directement à
ds² = - dt² + dr² +r² dq² + r² sin²q dj (19)
soit
ï-1 0 0 0 ï
ï 0 1 0 0 ï
gµn = ï 0 0 r² 0 ï (20)
ï 0 0 0 r²sin²q ï
Remarquons
qu' il est souvent plus simple de trouver les
nouvelles composantes du tenseur en insérant nos transformations de coordonnées
directement dans l'expression différentielle du ds² ( par exemple, dz = cosq.dr - r. sinq.dq ), plutôt que d'utiliser la loi de transformation des
tenseurs (12).
Comme
dans l'espace de Minkowski, nous utilisons la métrique pour calculer le produit
scalaire.
A.B =gmn Am Bn (21)
Ceci
suggère, en tant que notation abrégée, le concept d'abaissement des indices.
A
partir de n'importe quel vecteur, nous pouvons construire un tenseur (0,1)
défini par la contraction par la métrique.
An =gmn .Am (22)
Ainsi
le produit scalaire devient gmn Am Bn = An Bn . Nous pouvons aussi définir la métrique inverse gmn comme la matrice inverse du tenseur métrique.
gmn .gnr =
drm (23)
avec drm symbole
de Kronecker ( espace temps). Vous pouvez vous convaincre que cette expression
correspond vraiment à une multiplication de matrice ( En fait les composantes
correspondantes à celles du tenseur métrique, du tenseur métrique inverse sont
les cofacteurs divisés par le déterminant, du déterminant associé au tenseur
métrique)
Donc
nous avons aussi la possibilité d'élever des indices.
Am = gmn .An (24)
Remarquons
qu'élever un indice sur la métrique produit le symbole de Kronecker
, en conséquence :
gmn . gmn =
dµm = 4 (25)
En
dépit de l'ubiquité des tenseurs il est quelquefois utile de considérer des
objets non tensoriels.
Un
exemple important est le déterminant du tenseur métrique
g = det (gmn ) (26)
Un
calcul direct montre que sous une transformation de coordonnées xµ ®xµ', le déterminant
ne se transforme pas selon la loi de transformation des tenseurs ( sous laquelle il devrait être invariant s'il était un
tenseur, car ce serait un tenseur [0,0] sans indices, donc un scalaire) , mais
à la place:
g = [det (¶xm' /¶xm)]-2.
g (27)
Le
facteur det (¶xm' /¶xm) est appelé le
Jacobien de la transformation. Les objets qui se transforment selon cette loi
(impliquant des puissances du Jacobien) sont appelés des densités de tenseurs.
Le déterminant g est quelquefois appelé " densité de scalaire". Un
autre exemple de densité est l'élément
de volume d4x = dx0dx1dx2dx3
d4x = det (¶xm' /¶xm) d4x
(28)
Nous
pouvons donc définir un élément de volume invariant en multipliant d4x par la racine carrée de (- g) ,
ainsi le facteur Jacobien disparaît :
(-g )1/2
d4x = (-g )1/2 d4x (29)
En
coordonnées cartésiennes par exemple, nous avons (-g )1/2 d4x
= dtdxdydz, tandis qu'en coordonnées polaires
ceci devient r²sinq.dt.dr.dq.dj. Alors les intégrales de fonctions sur l'espace temps sont de la forme ò f(xm)(-g )1/2 d4x. ("Fonction" signifie ici évidemment la même
chose que "scalaire"). Un autre objet qui n'est malheureusement pas
un tenseur est la dérivée partielle ¶/¶ xm (¶µ
en abrégé). Appliquée à un scalaire, la
dérivée partielle produit un tenseur du meilleur crû, en effet en utilisant la
règle de chaînage habituelle nous avons:
¶µ f ®¶µ' f = (¶ xm /¶ xm' ) ¶µf (30)
En
accord avec la loi de transformation des tenseur. Mais sur un Vecteur Vm, étant donné
que Vm' = (¶ xm ' /¶ xm )Vm , nous avons
¶mVn ® ¶ m'Vn' = [(¶ xm /¶ xm' ). ¶µ ][(¶ xn' /¶ xn). Vn]
= (¶ xm /¶ xm' ) (¶ xn ' /¶ xn )¶mVn + (¶ xm /¶ xm' ) (¶² xn ' /¶ xm .¶ xn) Vm (31)
Le
premier terme nous plait bien, mais le second gâche tout. Nous allons donc
définir une dérivée covariante d'un tenseur
qui est égale à la dérivée partielle corrigée par un terme linéaire appliqué au
tenseur original.
![]() (32)
(32)
Ici
le symbole Gnml représente un
ensemble de nombres appelés coefficients de connexion, munis d'une loi de transformation
appropriée choisie pour annuler le terme
non tensoriel dans (31). Donc nous devons avoir
![]() (33)
(33)
Alors nous sommes certain que Ñm Vµ se transforme comme un tenseur. Le même
genre d'artifice marche pour définir une dérivée covariante pour les
tenseurs munis d'indices bas, nous
introduisons simplement un signe moins
et changeons l'indice opératoire de sommation.
![]() (34)
(34)
S'il
y a de multiples indices, pour chaque indice haut nous introduisons un terme
avec un + G et pour chaque indice
bas un terme avec un -G .
 (35)
(35)
C'est l'expression générale de la dérivée covariante.
Que
se cache t'il derrière sont ces mystérieux
coefficients de connexion ? Par chance nous pouvons en donner une
expression en fonction uniquement de la métrique
et de ses dérivées.
![]() (36)
(36)
Nous
vous laissons le soin de vérifier que le terme de droite a bien la loi de
transformation désirée. Vous pourrez également vérifier que les coefficients de connexion sont
symétriques dans leurs indices bas Gsmn = Gsnm . Ces coefficients peuvent être non nuls même dans un
espace plat, en cas de coordonnées non cartésiennes. Il existe d'autres types
de coefficients de connexion, que nous n'utiliserons pas ici. Ces coefficients
particuliers que nous avons choisis sont appelés Symboles de Christoffel, et ce sont ceux qu'on utilise en
RELATIVITÉ GÉNÉRALE. De la valeur de ces coefficients il s'ensuit que la
dérivée covariante de la métrique et de son inverse sont identiquement nuls,
cette propriété est appelée la compatibilité
métrique.
Ñsgmn = 0 , Ñsgmn = 0 (37)
Ainsi,
pour une métrique donnée gmn, nous calculons les coefficients de connexion
permettant de réaliser des dérivées covariantes. Beaucoup d'équations
familières de la physique dans un espace plat
continuent à être valables en
remplaçant les dérivées partielles par les dérivées covariantes
correspondantes.
Ainsi
en RELATIVITÉ RESTREINTE, les champs de vecteurs Magnétiques et Electriques B
et E peuvent être rassemblés au sein d'un même tenseur antisymétrique de rang deux. Fmn:
 ( 38)
( 38)
et la densité de
charge électrique r et le vecteur courant J peuvent
être rassemblés dans un quadri vecteur Jm
Jm = (r, J) ( 39)
Dans
cette notation les équations de Maxwell
 (40)
(40)
se
réduisent à deux relations.
![]()
![]() ( 41)
( 41)
Ces
équations sont valides dans l'espace de Minkowski, mais leur généralisation à
un espace courbe est immédiate, on remplace ¶m ®Ñm
![]() ( 42)
( 42)
![]()
Ce
sont ces équations (42) qui régissent l'électromagnétisme en Relativité
Générale.
Nous
avons évoqué le concept de courbure de l'espace temps sans en donner une
définition précise. Pour comprendre, il faut d'abord introduire la notion de Variété. Fondamentalement, une Variété est un espace éventuellement
courbe, dans lequel une région suffisamment petite (infinitésimale en réalité)
ressemble à un espace plat. La terre par exemple nous paraît plate parce que
nous n'en voyons qu'une toute petite partie ( alors
que globalement elle est ronde).
Une
caractéristique essentielle d'une Variété est qu'elle a le même nombre de
dimensions partout. Si on colle l'extrémité d'une corde à un plan, l'ensemble
n'est pas une Variété car il est partiellement à deux dimensions et
partiellement à une.
Les
exemples les plus connus de Variété sont l'espace plat à n dimensions Rn ("R" pour
nombre réel) et l'Hyper Sphère Sn
de dimension n. Ainsi R1 est une ligne réelle, R2 est le
plan, etc.., alors que S1 est le cercle , S2 la
sphère ( sa surface) etc..
Nous
utiliserons en général, les coordonnées "sphériques" ( r, q , f ), sur S2 ( qui est la surface de
la sphère). Dans ces conditions, avec r =1, la métrique sur S2 est
ds² = dq² + sin²df² (43)
Le
fait que les Variétés peuvent présenter une courbure rend la vie moins
monotone, comme vous vous en doutez. Mais la plupart des problèmes rencontrés
dans les espaces courbes, sont aussi présents dans les espaces plats si on
utilise des coordonnées non Cartésiennes. Le problème avec les espaces courbes,
c'est qu'on ne peut jamais utiliser de coordonnées Cartésiennes, car elles ne
peuvent décrire que des espaces plats. Alors les outils et méthodes à
développer pour des systèmes de coordonnées non Cartésiennes vont être
essentiels, en fait nous avons déjà pratiquement fait ce travail.
Il
n'est pas surprenant, que l'information sur la courbure d'une Variété soit
contenu dans la métrique, la question est : Comment l'extraire. On peut
l'obtenir à partir de Gsmn , par exemple,
car sa valeur est nulle ou non nulle selon le système de coordonnées (comme
nous l'avons vu en espace plat). Pour des raisons que nous ne développerons pas
ici, l'information sur la courbure est intégralement contenue dans un tenseur
de rang quatre, appelé tenseur de
Riemann de Courbure.
Cet
objet extrêmement important ( développé par Riemann
vers 1860, bien avant la Relativité) est donné en termes de symbole de
Christoffel par la formule.
![]() ( 44)
( 44)
Le
signe global est conventionnel, dans d'autres documents vous pouvez trouver la signe contraire.
Remarquons
que le tenseur de Riemann est construit à partir d'éléments non tensoriels
(dérivées partielles et symboles de Christoffel mais dont la combinaison
produit un tenseur comme vous pouvez le vérifier avec la loi de
transformation).
Une
propriété importante de ce tenseur est
qu'il s'annule (toutes ses composantes sont nulles) si et seulement si l'espace
est plat.
Opérationnellement,
"plat" signifie qu'il existe un système de coordonnées global dans
lequel les composantes de la métrique sont constantes partout.
Le
Tenseur de Riemann peut être contracté, il produit le tenseur de Ricci puis le scalaire de Ricci qui sont très utiles
en RELATIVITÉ GÉNÉRALE. Le tenseur de Ricci est donné par
![]() (45)
(45)
Bien
qu'il semble qu'on puisse faire d'autres contractions indépendantes, du fait
des symétries du tenseur de Riemann ( discuté ci
après), c'est la seule contraction indépendante.
La
trace du tenseur de Ricci produit le scalaire de Ricci:
![]() (46)
(46)
qui est
un autre élément très utile en RELATIVITÉ GÉNÉRALE.
Bien
que le tenseur de Riemann ait quatre indices, et donc 256 composantes, compte
tenu de ses nombreuses (anti)symétries, seulement 20 d'entre elles sont
indépendantes. Ci dessous quelques unes des propriétés du tenseur de Riemann
exprimées sur sa version totalement
covariante ( tous les indices bas).
![]()
![]()
![]()
![]() (47)
(47)
Ceci
implique que le tenseur de Ricci est symétrique.
![]() (48)
(48)
En
plus de ces identités algébriques, le tenseur de Riemann obéit à une identité
différentielle.
![]() (49)
(49)
Celle
ci est quelquefois appelée l'identité de
Bianchi. Si nous définissons un nouveau tenseur, le tenseur d'Einstein par
![]() (50)
(50)
Alors
l'identité de Bianchi implique que la divergence de
ce tenseur est identiquement nulle.
![]() (51)
(51)
Ceci
est quelquefois appelé l'identité de Bianchi
contractée.
Il
y a deux choses à connaître impérativement au sujet de la courbure: Le tenseur
de Riemann et les géodésiques. Vous connaissez le tenseur de Riemann, passons
aux géodésiques.
De
façon informelle , une géodésique est "le plus
court chemin entre deux points". Plus formellement, une géodésique est une
courbe qui extrémiste la fonction de longueur
ò ds. Supposons un chemin
paramétré par l, c.a.d xm(l). La distance infinitésimale le long de la courbe est donnée par
ds=ôgmn (dxm/dl)( dxn/dl) ô 1/2 .dl (52)
La
longueur totale de la courbe est
L = ò ds ( 53)
Pour
trouver la géodésique dans une géométrie donnée
nous avons donc à faire un calcul variationnel sur (53) compte tenu de
(52) pour ds et rechercher l'extremum de L. Par chance de grands esprits sont
passés par là et ont déjà fait le calcul. La réponse est que xm(l) est une géodésique si elle satisfait à la fameuse équation géodésique.
![]() (54)
(54)
( Insistons
sur le fait que l'équation géodésique s'établit uniquement à partir de
considérations géométrique sur les Variétés, sans aucune référence à la RELATIVITÉ
GÉNÉRALE)
En
fait cela n'est vrai que si l est un paramètre affine , c'est à dire relié
au temps propre par la relation
l = at + b ( 55)
En
pratique , c'est le temps propre qui est le plus
souvent utilisé comme paramètre affine (pour les géodésiques de type temps en
tout cas). Dans ce cas , le vecteur tangent est la quadri vitesse Um = dxm / dt , et l'équation géodésique peut être écrite
d Um /d t + Gmrs UrUs = 0 (56)
La
raison physique pour laquelle les géodésiques sont si importantes est qu'en
RELATIVITÉ GÉNÉRALE, les corps d'épreuve se déplacent sur des géodésiques. Si
ces corps sont sans masse, ces géodésiques sont de type lumière ( ds² =0) , et s'ils sont massifs les géodésiques sont de
type temps (ds²<0). Remarquons que le formalisme qui nous a conduit à dire
"extremum" pour une géodésique plutôt que "minimum" trouve
sa justification dans le fait que, pour des particules massives sur la
géodésique, le temps propre est maximum ( ce qui
explique le paradoxe des jumeaux, celui qui reste à la maison sur une
géodésique subit un temps propre maximum, donc est plus vieux, que celui qui a
voyagé et qui n'est donc pas resté sur cette géodésique, lorsqu'ils se retrouvent).
Et
maintenant, le quart d'heure philosophique. Avant la RELATIVITÉ GÉNÉRALE, la
physique Newtonienne disait " les particules non soumises à des forces
suivent une ligne droite", la gravitation étant l'une de ces forces parmi
d'autres. Maintenant en RELATIVITÉ GÉNÉRALE la gravitation est représentée par
une courbure de l'espace temps, pas par une force. Du point de vue de la
RELATIVITÉ GÉNÉRALE, les particules se meuvent sur des géodésiques si elles ne
sont pas soumises à des forces, forces dont la gravitation est exclue. Si nous
considérons , le mouvement de particules soumises à d'autres forces que
gravitationnelles ( électromagnétiques par exemple) , elles ne se déplaceront
pas sur des géodésiques, nous pouvons toujours utiliser (54) pour décrire leur
mouvement, mais nous devons ajouter un terme représentant la force en question
dans le membre de droite. Dans ce sens l'équation géodésique est quelque chose
comme l'expression dans un espace courbe de
F = mg = 0
Le
passage des mathématiques à la physique implique l'introduction d'équations
dynamiques pour décrire les relations entre la matière et l'énergie et la
courbure de l'espace. En RELATIVITÉ GÉNÉRALE, "l'équation du
mouvement" pour la métrique est la fameuse équation d'Einstein
![]() (57)
(57)
Remarquons
que le membre de gauche correspond à l'expression du tenseur d'Einstein Gmn donnée
par (50). G est la constante de Newton ( pas la trace
Gmn ). Tmn est un
tenseur symétrique de rang 2, appelé le tenseur Energie Impulsion. Il contient
tout ce que nous devons connaître sur l'énergie et l'impulsion des champs de
matière, qui agissent comme source de gravitation. Donc le membre de gauche de
l'équation mesure la courbure de l'espace , et le
membre de droite l'énergie et l'impulsion qu'il contient. Simplement génial!
Les
composantes Tmn du tenseur énergie impulsion représentent le
flux de la mième composante de l'impulsion dans la nième direction. Enoncé ainsi c'est quasi incompréhensible
et peu utile, concrètement, considérons une forme de matière qu'on affectionne
particulièrement en RELATIVITÉ GÉNÉRALE à savoir un fluide parfait, défini comme un fluide isotrope dans son
référentiel repos. Ceci signifie qu'il n'a ni viscosité ni perte calorique, il est alors entièrement
défini par sa densité d'énergie r et sa pression p dans son référentiel repos ( isotrope , identique à lui même dans toutes les
directions). Si Uµ
désigne la quadri vitesse d'un élément du fluide , le
tenseur énergie impulsion prend alors la forme.
![]() (58)
(58)
Si
nous élevons un indice et tenons compte de la normalisation des vitesses gmnUmUn= -1, nous obtenons une version plus explicite
![]() ( 59)
( 59)
Si
Tmn contient
tout ce que nous devons connaître de l'énergie et de l'impulsion, il doit satisfaire
aux lois associées de conservation. En fait cela s'énonce en termes
mathématiques par la nullité de la divergence covariante.
Ñm Tmn= 0 (60)
Rappelons
nous que l'identité de Bianchi (51) garantit que la divergence
du tenseur d'Einstein est identiquement nulle. Donc l'équation d'Einstein
garantit la conservation d'énergie impulsion. Bien sûr ,
c'est une relation locale. Si nous intégrons ( par
exemple) la densité d'énergie rsur une hyper surface de type espace, la quantité correspondante n'est
pas constante dans le temps. Il n'y a pas en RELATIVITÉ GÉNÉRALE la notion de
conservation globale de l'énergie. La relation (60) exprime la conservation
locale, et la présence de la dérivée covariante autorise le transfert d'énergie
entre la matière et les champs gravitationnels.
L'apparente
opacité de l'équation d'Einstein, ne doit pas nous masquer le fait qu'elle est
une extension naturelle de la gravitation Newtonienne. Pour s'en convaincre
considérons l'équation de Poisson relative au potentiel Newtonien f
Ѳf = 4pG (61)
où r est la densité de matière. Dans le membre de droite
nous avons un opérateur différentiel du deuxième ordre appliqué sur le
potentiel de gravitation f. Ceci est
proportionnel à la densité de matière. Comme la RELATIVITÉ GÉNÉRALE est une
théorie complètement relativiste, la densité de matière doit être remplacée par
son équivalent invariant par transformation, le tenseur énergie impulsion Tmn . Pour être similaire à (61), ceci doit être
proportionnel à un tenseur de rang 2 agissant comme un opérateur différentiel
du second ordre sur le champ gravitationnel décrit par la courbure de l'espace
en RELATIVITÉ GÉNÉRALE qui dépend uniquement de la métrique. De la définition de Gmn en termes de gmn , c'est exactement ce que le tenseur d'Einstein fait.
En fait Gmn est le seul
tenseur de rang deux, construit sur
des dérivées premières et secondes de la métrique dont la divergence covariante
est nulle.
L'équation
de la RELATIVITÉ GÉNÉRALE a bien la même forme
que celle de Newton. De plus , l'équation de la
RELATIVITÉ GÉNÉRALE doit "converger" vers celle de Newton dans les
conditions de la "limite
Newtonienne" suivantes: Vitesse des particules faible par rapport à "c",
champ gravitationnel faible ( ce qui permet de le considérer comme une
perturbation de l'espace plat) , et champ statique. Considérons une métrique
qui est presque celle de Minkowski, la différence étant qu'on a rajouté une
sorte particulière de (petite) perturbation:
ds² = -(1+2f) dt² + (1-2f) dx²
(62)
Où
f est une fonction des coordonnées spatiales xi .
Si nous substituons ceci dans l'équation géodésique et que nous le résolvons
pour la vitesse classique ( tri vitesse) utilisant le
fait que comme les particules se meuvent lentement, c'est une bonne
approximation, nous obtenons
d²x/dt² = -Ñf (63)
où Ñ représente
ici l'opérateur de divergence spatiale classique ( pas la dérivée covariante).
Ceci n'est autre que l'équation d'une particule se déplaçant dans un champ
gravitationnel Newtonien de potentiel f. Si par ailleurs nous calculons la composante 00 du
membre de gauche de l'équation d'Einstein:
R00 -1/2 Rg00 = 2Ѳf (64)
La
composante 00 du membre de droite de l'équation est simplement ( au premier ordre des petites valeurs de f et r)
8pGT00 = 8pGr (65)
Donc
l'équation d'Einstein appliqué à la métrique (62) produit
Ѳf = 4pGr (66)
Ce
qui est précisément l'équation de Poisson (61). Donc dans cette limite la RELATIVITÉ GÉNÉRALE converge avec la gravitation Newtonienne.
Bien
que l'équation complète non linéaire d'Einstein (57) paraisse simple, dès qu'on
cherche à l'appliquer, on se rend compte qu'il n'en n'est rien. Si on se souvient
de la définition du tenseur de Riemann en termes de symboles de Christoffel, et
de leur définition en termes de Métrique, on réalise la complexité de cette équation. Elle est également
hautement non linéaire et de ce fait difficile à résoudre. Si nous prenons la
trace de (57) , nous obtenons
- R = 8pGT (67)
Insérant
ceci dans (57) nous donne une autre forme de l'équation d'Einstein
![]() (68)
(68)
Cette
forme est très utile si nous considérons le cas où nous sommes dans le vide, pas
d'énergie impulsion. Dans ce cas Tmn = 0 et (68) devient l'équation d'Einstein dans le vide:
Rmn = 0 (69)
Ceci
est déjà plus simple à résoudre que l'équation complète.
Un
dernier mot sur l'équation d'Einstein : Elle peut être dérivée d'un Lagrangien
très simple, L= (-g) 1/2 . R , avec g
déterminant de la métrique et R scalaire de Ricci ( plus un terme approprié
pour les champs de matière). En d'autres termes ,
l'action en RELATIVITÉ GÉNÉRALE est simplement
S = ò d4x (-g) 1/2 . R ( 70)
L'équation
d'Einstein correspond à l'extremum de cette action (
d'Hilbert) par rapport aux variations de la métrique gmn. Enoncé ainsi,
c'est beaucoup plus élégant .
6- La
solution de Schwarzschild et les trous noirs
Pour
résoudre l'équation d'Einstein, nous somme amenés en
général à faire des hypothèses simplificatrices. Par exemple dans beaucoup de situations
physiques, nous avons une symétrie sphérique. Si nous voulons résoudre
l'équation pour une métrique gmn, cette symétrie nous simplifie la tâche, car
indépendamment de la RELATIVITÉ GÉNÉRALE un calcul formel nous montre que la
métrique générique associée ( en coordonnées sphériques) est de la forme
ds² = - A ( r,t)
dt² + B (r,t) dr² + r² (dq² + sin²q df² ) (71)
où A et B
sont des fonctions positives de (r,t), et vous reconnaîtrez la métrique sur une sphère décrite en (43).
Si
nous insérons cette métrique dans l'équation d'Einstein, nous allons obtenir
une solution pour une distribution de
matière sphérique. Pour être encore plus restrictif, considérons l'équation
dans le vide (69). Alors il y a une solution unique :
![]() (72)
(72)
avec ![]()
C'est
la célèbre métrique de Schwarzschild,
solution de l'équation d'Einstein. Le paramètre m, est la masse conventionnelle
Newtonienne contenue à l'intérieur de la sphère de rayon r considéré. Un fait
remarquable est que la métrique de Schwarzschild est l'unique solution à
l'équation d'Einstein, dans le vide pour une distribution de matière à symétrie sphérique. Ce fait , conséquence
du théorème de Birkhoff, signifie
que même si la matière oscille largement, le champ gravitationnel à l'extérieur
n'est pas perturbé, aussi longtemps que la symétrie sphérique est conservée.
Un
point de philosophie : Les composantes de la métrique "explosent"
pour r = 0 et r = 2Gm. En principe, tout point en lequel les composantes de la
métrique sont infinis ou présentent une pathologie marginale est appelé un
point singulier et présente une singularité.
Ceci se divise en deux catégories, les singularités de coordonnées et les
singularités "vraies". Une singularité de coordonnées signifie qu'on
a choisi un système de coordonnées inapproprié, et peut s'éliminer par un
changement de coordonnées. Une singularité vraie est une pathologie véritable
de la géométrie de la Variété en ce point qui conduit à exclure le point de la
Variété.
Dans
la géométrie de Schwarzschild, le point r = 0 est une vraie singularité où la
métrique n'est pas définie. Par contre le point r = 2Gm est simplement une
singularité de coordonnées. Nous pouvons le montrer en effectuant une
transformation qui conduit aux
coordonnées de Kruskal définies par:

 (73)
(73)
Dans
ces coordonnées, la métrique (72) prend la forme
![]() (74)
(74)
avec ![]()
Où
r est une fonction implicite de u et v défini par
![]() ( 75)
( 75)
En
examinant (74), on voit que la singularité
à r = 2Gm est éliminée. Le fait que nous puissions trouver des
coordonnées où la singularité est éliminée montre qu'il s'agissait d'une simple
singularité de coordonnées. La chose intéressante avec la métrique de
Schwarzschild est qu'elle décrit aussi bien des objets très familiers comme le
système solaire que des objets plus exotiques comme les trous noirs. Pour s'en
rendre compte regardons comment les particules se déplacent dans la géométrie
de Schwarzschild. On s'aperçoit qu'on
peut traiter le problème d'une particule se déplaçant dans le plan q = p/2 comme un
problème unidimensionnel relatif à la coordonnée r = r (t). Autrement dit,
la distance d'une particule au point r = 0 est solution de l'équation
![]() ( 76 )
( 76 )
C'est
tout simplement l'équation du mouvement d'une particule de masse unitaire et
d'énergie E dans un potentiel unidimensionnel V ( r ).
Ce potentiel pour la géométrie de Schwarzschild est donné par
![]() ( 77 )
( 77 )
Ici,
L représente le moment angulaire par
unité de masse de la particule et e est une constante égale à zéro pour les particules
sans masse et + 1 pour les particules massives. Remarquons que le temps propre t est nul pour les particules sans masse
, et que nous utilisons un autre paramètre l dans (76),
mais l'équation reste la même. Donc pour trouver les orbites des particules en
métrique de Schwarzschild, nous devons résoudre l'équation du mouvement d'une
particule dans un potentiel central donné par (77). Notons que le premier terme
est constant, que le second est
identique à celui de la gravitation Newtonienne , que
le troisième est la contribution du moment d'inertie de la particule, qui existe aussi en théorie
Newtonienne. Seul le dernier terme de (77) est propre à la RELATIVITÉ GÉNÉRALE.
Ce
terme supplémentaire a deux conséquences importantes. D'abord il agit comme une
petite perturbation sur une orbite, ce qui conduit à la précession de l'orbite
de Mercure par exemple, ensuite pour r très petit le potentiel gravitationnel
en RELATIVITÉ GÉNÉRALE tend vers - ¥, ce qui signifie que si une particule s'approche trop
près de r = 0, elle va être piégée et ne pourra jamais s'échapper.
Ceci
est vrai dans le contexte de particules de test non soumises à d'autres forces,
et ceci va également tenir pour des particules capables d'accélérer ( voir ci après). Rassurons nous, car avec une étoile comme
le Soleil, dont la métrique de Schwarzschild ne décrit la situation qu'à
l'extérieur, elles percuteront la surface du Soleil ( est
ce plus enviable ?), avant d'approcher de la zone étrange où toute fuite est
impossible. Pourtant il y a des situations où cela peut arriver.
Les trous noirs.
Un trou noir est un corps dont toute la masse s'est effondrée en
deçà du point de non retour. Ce point de non retour situé à sur une surface à r
= 2 Gm, est appelé l'horizon des évènements que l'on peut se représenter comme la
"surface" du trou noir. Bien qu'il soit impossible de rentrer plus en
détail, dans les propriétés intéressantes de l'horizon des trous noirs, les
concepts de base ne sont pas difficiles à comprendre.
Du
point de vue d'un observateur extérieur, une horloge tombant dans un trou noir,
apparaît battre de plus en plus lentement à mesure qu'elle s'approche de
l'horizon des évènements.
En
fait un observateur extérieur ne verra jamais
une particule de test traverser la surface à r = 2 Gm,
il verra la particule s'en rapprocher indéfiniment mais de plus en plus
lentement.
A
contrario, il en serait autrement si vous étiez l'observateur de test tombant dans le trou noir, le temps vous
apparaîtrait toujours se dérouler au même rythme, du fait que vous et votre
Bracelet Montre sont dans le même référentiel inertiel, vous ne sentiriez
jamais le temps se "ralentir".
Donc,
atteindre l'horizon des événement ne réclamera pas un
temps infini, bien au contraire, vous traversez l'horizon à toute allure.
L'horizon franchi, vous vous trouvez projeté inéluctablement et très rapidement
au point r = 0. L'horizon passé, il n'y a pas d'échappatoire, le temps coule dans la direction des
"r" décroissants.
On
peut voir cela sur la métrique ( 72) en notant que r
devient une coordonnée de type temps
pour r < 2 Gm. Le pire est que si vous
essayez de contrarier ce mouvement en allumant des rétrofusées par exemple,
cela ne fera que raccourcir l'échéance fatale du fait que la géodésique ( mouvement de chute libre) maximise le temps propre comme
nous l'avons vu précédemment. En fait en raison des forces de marée colossales
vous êtes déchiquetés très rapidement ( sauf pour des
trous noirs très super massifs où l'effet de marée est moins prononcé). Le
triste sort d'un astronaute au cœur d'un trou noir est décrit en détail dans Misner, Thorne et Wheeler p 860-862.
Le
diagramme d'espace temps d'un trou noir en coordonnées de Kruskal (74) est
montré sur la figure 2.
Ce
qui est représenté correspond à une coupe de l'espace temps entier,
correspondant aux coordonnées angulaires
q = p/2 et f = 0. Il y a
deux régions asymptotiques, une à u ® + ¥ et l'autre à u ® - ¥ , dans ces deux régions la métrique paraît
approximativement plate. L'horizon des évènements est la "surface " r = 2 Gm,
soit u = ± v. Dans ce
diagramme tous les cônes de lumière sont à ± 45 °. A
l'intérieur de l'horizon des évènements
où r < 2 Gm,
toutes les trajectoires de type temps conduisent à la singularité à r = 0. Insistons sur le fait que ce
diagramme représente l'extension
mathématique maximum de la solution de Schwarzschild, une solution complète
de l'équation d'Einstein dans le vide , mais que cela ne correspond pas forcement à des solutions physiques réalistes.
Pourtant pendant que nous y sommes évoquons un autre aspect encore plus étrange
associé aux trous noirs: les trous de ver

Figure 2 : Le diagramme
de Kruskal : la solution de Schwarzschild en coordonnées de Kruskal (74), où
tous les cônes de lumière sont à ± 45°. La surface r = 2Gm est l'horizon
des évènements, à l'intérieur de l'horizon des évènements ,
tous les chemins de type temps rencontrent la singularité à r = 0. Les parties
droites et gauches du diagramme représentent deux régions de l'espace temps
asymptotiquement plates distinctes. Chaque point du diagramme représente une
sphère ( de rayon r)
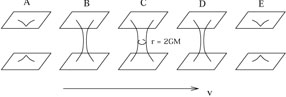
Trous de ver
Le diagramme de Kruskal
définit donc quatre régions décrites sur la figure 3, ci dessous.

Figure 3
La
région I est notre espace, la région II est l'intérieur de la surface de
l'horizon du trou noir que nous pouvons atteindre en un temps fini, donc qui
fait partie de la Variété décrivant notre espace temps ( à
l'exclusion de la singularité). Les parties III et IV "symétriques"
sont plus inattendues. La région III correspond à une région où tout objet qui
y est placé est "expulsé"
vers la région IV, autre univers semblable au notre mais miroir où de la matière surgit ex nihilo au lieu d'y
être absorbée ( trous blancs). Il ne semble pas qu'on puisse atteindre la
région IV depuis la région I, pourtant..
On va voir qu'elle est
connectée à la région I par un trou de
ver, un goulot d'étranglement spatio-temporel reliant deux régions distinctes.
Examinons le diagramme de Kruskal en le découpant en surfaces de type espace
à v
constant ( Figure 4) 
Figure
4
Dessinons chaque tranche en restaurant une des
coordonnées angulaires pour clarifier ( fig 5) (chaque
cercle horizontal correspond alors à une sphère).
Le diagramme ci dessous est
spatio-temporel.
![]()
u
Figure
5
Donc
la géométrie de Schwarzschild décrit vraiment deux régions asymptotiquement plates
qui mènent l'une vers l'autre, se connectent via un trou de ver pendant très un
court instant puis se déconnectent. Mais les trous de vers se ferment trop
rapidement pour qu'un observateur puisse passer d'une région à l'autre. Si on considère la vitesse liée à la
coordonnée v = cte,
on voit qu'elle est toujours supérieure à "c" pour passer : Un cas
limite concerne les photons en orbite
sur l'horizon qui peuvent passer par effet tunnel quantique ).
Cette
histoire de deux espaces temps miroirs, séparés communiquant pendant un court
instant puis se refermant parait assez invraisemblable. Il n'est pas sûr que
cela se passe vraiment ainsi dans le monde physique car la métrique de
Schwarzschild ne modélise pas avec précision l'univers entier. N'oublions pas
qu'elle n'est valide que dans le vide, à l'extérieur des étoiles par exemple.
Si cette étoile a un rayon supérieur à 2GM,
nous n'aurons pas à nous soucier d'horizons.
De
plus, dans un trou noir formé par effondrement
d'une étoile massive, les équations du vide sont plus restrictives et il
n'y aura pas deux régions
asymptotiquement plates, mais une seule, celle où l'étoile était située ( fig 6). En cela, des trajectoires de type temps ne
pourront pas s'étendre dans les deux régions, et nous ne saurons
pas dire si l'autre région existe vraiment.

Figure
6
Dans
l'effondrement d'une étoile en trou noir, toute l'information relative à
l'objet en cours d'effondrement est perdue, sa constitution, sa forme etc. Les
seules informations conservées par le trou noir sont sa masse, son moment
d'inertie et sa charge électrique. Ce fait, qu'on appelle le théorème "les trous noirs n'ont pas de poils"
implique que la métrique du trou noir ne peur être
fonction que de ces trois grandeurs seulement. Comme les trous noirs réels sont
probablement électriquement neutres, nous ne présenterons pas les trous noirs
chargés (la métrique de Reissner -
Nordstrom).
Les
trous noirs en rotation par contre présentent un intérêt considérable en
astrophysique, ils sont décrits par la métrique
de Kerr.
![]() ( 78)
( 78)
![]()
![]() ( 79)
( 79)
où a est le moment cinétique par unité de
masse. Ces trous noirs sont plus complexes et ont sur le plan mathématique des
propriétés encore plus étranges que les trous noirs de Schwarzschild ( cf cours détaillé).
Pour
finir, parmi les nombreuses propriétés remarquables, signalons la conjecture de censure cosmique.
Remarquez comment la singularité à r = 0 est cachée, dans la mesure où vous ne
pouvez pas y accéder sans franchir l'horizon. Il est conjecturé que ceci est
toujours vrai , dans toute solution de l'équation
d'Einstein. Pourtant , des calculs numériques semblent
mettre en cause cette conjecture, dans certains cas particuliers tout au moins.
La méthode qui a conduit à la solution de Schwarzschild
( utilisation des symétries) peut être reconduite avec
le même succès en Cosmologie sur l'hypothèse que l'Univers est homogène et
isotrope dans ses trois dimensions d'espace ( pas en ce qui concerne le temps,
puisqu'on constate qu'il est dynamique, définissant un passé et un futur
différents). Cette propriété implique l'existence d'un référentiel repos pour l'Univers , qui définit une coordonnée de temps universelle
et particularise des hyper surfaces tri dimensionnelles perpendiculaires à
cette coordonnée. Dans l'Univers réel, ce référentiel repos est celui dans
lequel les Galaxies sont statistiquement au repos et où le RFC est isotrope.
L'Homogénéité signifie que la courbure de l'espace temps est la même en tout
point à un temps t donné. L'Isotropie est un concept plus délicat, mais
signifie que l'Univers est le même dans toutes les directions. Par exemple la
surface d'un cylindre est homogène ( tous les points sont identiques) mais pas isotrope ( la
direction parallèle à l'axe est privilégiée). Un cône est isotrope autour de
son sommet mais pas homogène.
Ces hypothèses réduisent le choix de la métrique à
trois formes, regroupées dans la métrique
de Robertson Walker ( RW).
![]() (80)
(80)
où k est une constante qui peut valoir -1 , 0 , ou +1. La fonction a(t) est appelée le facteur d'échelle, et nous indique la taille relative des hyper
surfaces spatiales.
Les
coordonnées ci dessus, sont appelées coordonnées Comobiles, car un point au
repos par rapport au référentiel préférentiel de l'Univers a ses coordonnées r, q, f constantes. Le cas k = - 1 ,
conduit à une métrique correspondant à
ce qui est appelé un Univers
ouvert , dont les hypersurfaces typiques sont des hyperboloïdes à 3
dimensions ( Hyper selle de cheval, pour des hyper chevaux sans doute), le cas k = 0 correspond à un Univers plat dont les hypersurfaces de
référence vont être des espaces Euclidiens 3D, le cas k = + 1, va correspondre à un Univers
fermé, dont les hypersurfaces sont typiquement des hyper sphères 3D.
Remarquons que le terme "
ouvert", "fermé" et "plat" ne s'applique qu'à la
géométrie spatiale des hypersurfaces 3D, pas au destin temporel de l'Univers, à
savoir s'il s' étendra indéfiniment ou se re-contractera après avoir atteint un
maximum. Par ailleurs nous n'avons considéré que les topologies triviales
simplement connexes.
Le
volume d'un Univers fermé est fini, alors que les Univers plats ou ouverts ont
des volumes infinis ( s'ils sont simplement connexes,
autrement ils peuvent avoir des volumes finis par exemple un hyper tore ).
On
peut écrire (80) dans d'autres systèmes de coordonnées en particulier si on
pose :
r
= (siny,
y, sinhy) pour k = ( +1, 0, - 1) respectivement on obtient
ï[ dy² + sin²y ( dq² + sin²q.df²)] pour
k = +1
ds² = - dt² +
a²(t)ï[ dy² + y² ( dq² + sin²q.df²) ] pour
k = 0
ï[dy² + sinh²y ( dq² + sin²q.df²)] pour
k = -1 (81)
De
plus le cas k = 0 peut être écrit en coordonnées quasi Cartésiennes
ds² = - dt² +
a²(t) ( dx² + dy² + dz² ) soit
ds² =
- a²(h) ( -dh² + dx² + dy² + dz² ) (82)
Dans
la dernière expression, h est appelé
le temps conforme et est défini par
h= ò dt/a(t) (83)
Les
coordonnées (h,x,y,z) sont souvent appelées les "coordonnées conformes".
Comme
la métrique RW est la seule métrique possible homogène, ce que nous avons à
faire est de résoudre l'équation d'Einstein sur cette métrique, ce qui nous
donnera a(t).
Si
nous utilisons l'équation dans le vide nous ne trouvons que l'espace de
Minkowski comme solution. Nous avons donc besoin d'introduire de l'énergie et
de l'impulsion pour trouver quelque chose d'intéressant. Pour simplifier, nous
allons assimiler le contenu de l'Univers à un fluide parfait de densité
d'énergie r et de pression p.
Dans ce cas l'équation d'Einstein produit deux équations différentielles pour a
(t) ( en effet les 3 équations d'espace se ramènent à
une seule du fait des symétries ), appelées équations de Friedmann.
![]()
![]() (84)
(84)
Comme
les équations de Friedmann déterminent l'évolution de la métrique de Robertson
Walker, on parle souvent de Cosmologie FRW et même FLRW quand on inclut
Lemaître.
L'expansion
de l'Univers se mesure avec le paramètre
de Hubble :
![]() (85)
(85)
et la
variation de ce paramètre dans le temps est caractérisée par le paramètre de
décélération :
q =
a".a/a'² = - ( 1 + H'/H²) (86)
Les
équations de Friedmann peuvent être résolues si on choisit une équation d'état (entre r et p.), mais les solutions peuvent être complexes. La solution pour k =
0 est simple. Si l'équation d'état est p = 0, l'Univers est dominé par la
matière et
a(t) µ t 2/3 (87)
Dans
un Univers dominé par la matière, la densité d'énergie décroît quand le volume
s'accroît, donc
r mat µ a -3 (88)
si p = r/3 , l'Univers est dominé par le rayonnement et
a (t) µ t 1/2
(89)
Dans
un Univers dominé par le rayonnement , le nombre de photons décroît quand le
volume s'accroît, et l'énergie de chaque photon est décalée vers le rouge
proportionnellement à a(t), donc
r ray µ a -4 (90)
Si
p = - r, alors l'Univers est dominé par le vide et
a(t) µ e Ht (91)
Un
Univers dominé par le vide est aussi appelé, Univers de de Sitter. Dans un tel Univers, la densité d'énergie est constante,
ainsi que le paramètre de Hubble, et ils sont liés par:
H (8pGrvide/3)1/2
= Constante (92)
Remarquons
que quand a® 0, c'est r ray qui croît le plus vite, donc ,
si nous retournons dans le passé nous devrions trouver une période dominée par
le rayonnement . Par contre rvide reste constant lorsque l'Univers s'étend, donc s'il
n'est pas nul, et que l'Univers dure suffisamment longtemps, nous atteindrons
éventuellement une phase dominée par le vide. Etant donné que nous constatons
que l'Univers s'étend, nous pouvons nous demander s'il en sera ainsi pour
toujours, ou si nous allons atteindre une limite au delà de laquelle une phase
de contraction va commencer. Pour des sources d'énergie avec p et r ³ 0, ( incluant les Univers dominés par la matière et le
rayonnement), les Univers fermés ( k = +
1 ) peuvent éventuellement se re contracter alors que les Univers ouverts
s'étendent à jamais. Avec p et r < 0, les choses se compliquent, gardez juste en
mémoire qu'il n'y a pas de
correspondance fixe entre spatialement fermé/ouvert et temporellement
fini/infini. Pour déterminer si l'Univers est ouvert ou fermé nous devons faire
des observations. Dans un Univers plat, limite entre les deux cas, la densité
est égale à la densité critique, et
vaut
r crit = 3 H²/8pG (93)
Notons que ceci évolue au cours du temps , actuellement elle est de 5 x 10-30 grammes/cm3
Notre
Univers sera ouvert si la densité est inférieure à cette valeur, fermé dans le
cas contraire. Donc il est utile de définir le paramètre de densité
W = r/r crit = 3 H²r/8pG = 1 +
k/a'² (94)
Cette
valeur change également au cours du temps sauf si elle est strictement égale à
1. Un Univers ouvert est caractérisé
par W < 1, un
Univers fermé par W > 1.
Nous
avons déjà mentionné le décalage vers le rouge des photons dans un Univers en
expansion. Un photon émis avec une longueur d'onde l1 à un
temps t1, va être observé
avec une longueur d'onde l0 à un temps t0
conformément à :
l0/l1 = a (t0)/a(t1)
(95)
Définissons
le décalage vers le rouge z comme
l'accroissement relatif en longueur d'onde.
z
= l0 - l1 / l1 = (l0/l1 ) - 1 = [a (t0) /a(t1) ] - 1 (
96)
Gardez
à l'esprit que ceci mesure seulement l'expansion nette de l'Univers entre le
temps d'émission et le temps de réception, et n'a rien à voir avec un effet Doppler , qui résulterait d'une vitesse relative entre les
deux, rappelez vous que le cadre de Relativité Générale est un Espace temps
décrit par une Variété Riemannienne et que dans ce contexte, ces vitesses ne
sont en général pas bien définies. (cf cours détaillé).
Cependant il est habituel d'en parler comme si le décalage vers le rouge était
dû à un effet Doppler résultant d'une
vitesse relative entre la source et l'observateur, sur le plan strictement
mathématique, ceci n'a aucun sens dans ce contexte, même si pour les faibles
valeurs de z cela peut se ressembler. Alors la constante de Hubble décrit la
relation entre la distance s ( mesurée sur une hyper
surface de type espace) et le décalage vers le rouge entre une source et
l'observateur
z = H (t0).s (97)
Ceci
est bien sûr la relation linéaire découverte par Hubble.